On October 19-25, 2025, members from our BRAIN lab attended the 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2025) at Hangzhou, CHINA. They presented seven papers at IROS 2025, both as oral and poster presentations.
Embodied Intelligence (Morphological computation):
1. “A Ribbed Hybrid Rigid-Flexible Tail with Graded Stiffness and Anisotropic Friction for Enhanced Robot Locomotion and Fall Damage Prevention”, accepted at IROS
2. “LITHE-joint: Variable Stiffness Compliant Spherical Contact Joint in an Under-Actuated System”, accepted at IROS
Adaptive Neural Control (Neural computation):
3. “Bio-Inspired Plastic Neural Networks for Zero-Shot Out-of-Distribution Generalization in Complex Animal-Inspired Robots”, accepted at IROS
4. “Multimodal Obstacle Detection and Adaptive Neural Control for Autonomous Drones”, accepted at IROS
5. “Performance Consequences of Information-based Centralization Arising from Neural and Mechanical Coupling in a Walking Robot”, accepted at IROS
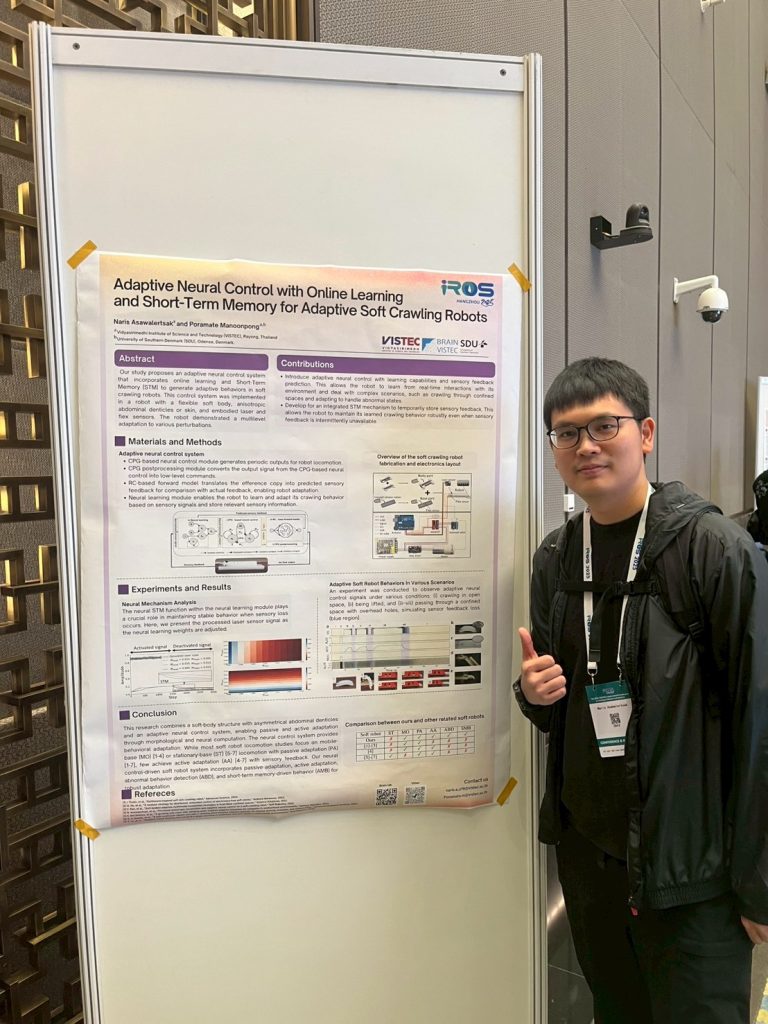
6. “Adaptive Neural Control with Online Learning and Short-Term Memory for Adaptive Soft Crawling Robots”, accepted at IEEE Robotics and Automation Letters (presented at IROS)
Robotics for the oil and gas industry (Technology demonstration-TRL5-6):
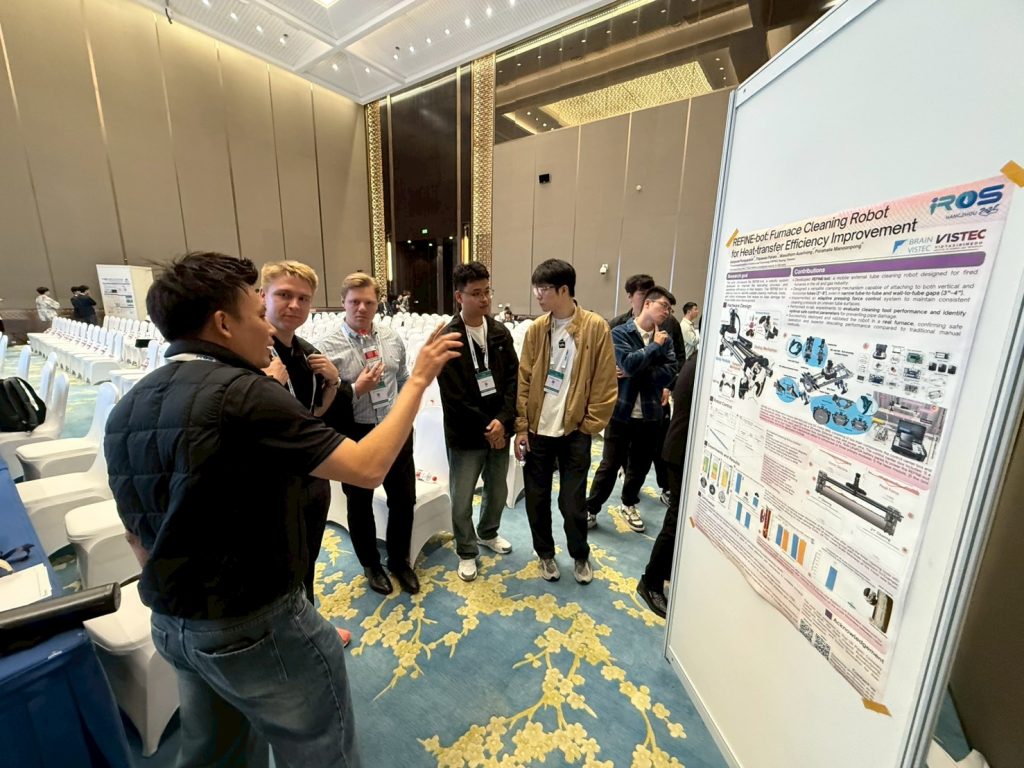
7. “REFINE-bot: Furnace Cleaning Robot for Heat-transfer Efficiency Improvement”, accepted at IROS