Frontier Research Overview
“Traditionally, the inspection of pipelines has been done by inspectors checking the pipes. This can be erroneous, time-consuming, and labor-intensive.”

To overcome the problem, different types of mobile robotic systems for the inspection have been developed. However, existing robots still have several limitations, e.g., lacking versatility, energy efficiency, and adaptability. We therefore aim to develop intelligent robotic inspection systems with versatility, energy efficiency, and adaptability for effective remote inspection of pipelines in the oil and gas industry.
Neural Dynamics and Synaptic Plasticity in Simple Networks Drive Lévy Flight Foraging and Obstacle Avoidance Behaviors
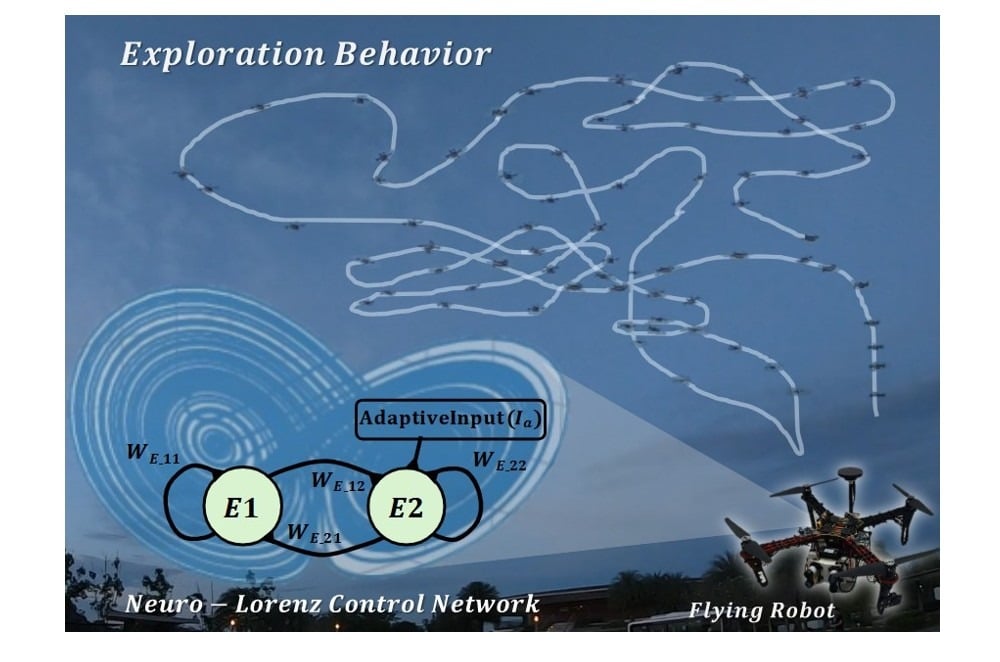
We propose an efficient and adaptive neural exploration control system based on a small recurrent neural network. Through its synaptic weights and adaptive inputs, the network exhibits dynamics similar to a discrete-time Lorenz attractor, generating a baseline signal that is transformed via adaptive bias thresholding into exploration commands. This enables adaptive switching between local and global search behaviors, resembling Lévy flight. To ensure safe operation in complex environments, we integrate an adaptive neural obstacle avoidance mechanism. The proposed system is validated on simulated and real flying robots, demonstrating effective, animal-like exploration with robust obstacle avoidance.
Paper: https://doi.org/10.1016/j.neunet.2025.107913
Reference: V. Jaiton and P. Manoonpong, Neural Dynamics and Synaptic Plasticity in Simple Networks Drive Lévy Flight Foraging and Obstacle Avoidance Behaviors for Bio-inspired Autonomous Flight, Neural Networks, vol. 192, p. 107913, 2025, doi: 10.1016/j.neunet.2025.107913.
Multimodal Obstacle Detection and Adaptive Neural Control for Autonomous Drones

We presented an integrated multimodal obstacle detection and adaptive neural control system that enables drones to navigate autonomously in both daytime and nighttime environments. By fusing dual ranging LiDARs and a depth camera with efficient sensory processing—such as iKD-Tree interested-area search, sensor fusion, and neural obstacle directional features. On top of this, an adaptive neural controller with online learning continuously updates control weights using Hebbian learning and synaptic scaling, allowing the drone to dynamically adjust its speed and safely maneuver around obstacles in real time. Key contributions:
- Robust multimodal obstacle detection for reliable operation in both day and night conditions.
- Adaptive neural control with online learning for real-time speed and motion adjustment.
- Comprehensive validation through simulation and real-world flight experiments.
Video: https://www.youtube.com/watch?v=agZfvFkkVxY&t=11s
Paper:https://ieeexplore.ieee.org/document/11246601
Reference:T. Phetpoon et al., “Multimodal Obstacle Detection and Adaptive Neural Control for Autonomous Drones,” 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025, pp. 3495-3502, doi: 10.1109/IROS60139.2025.11246601.,
2024
Robust Precision Landing of a Quadrotor with Online Temporal Scaling Adaptation of Dynamic Movement Primitives
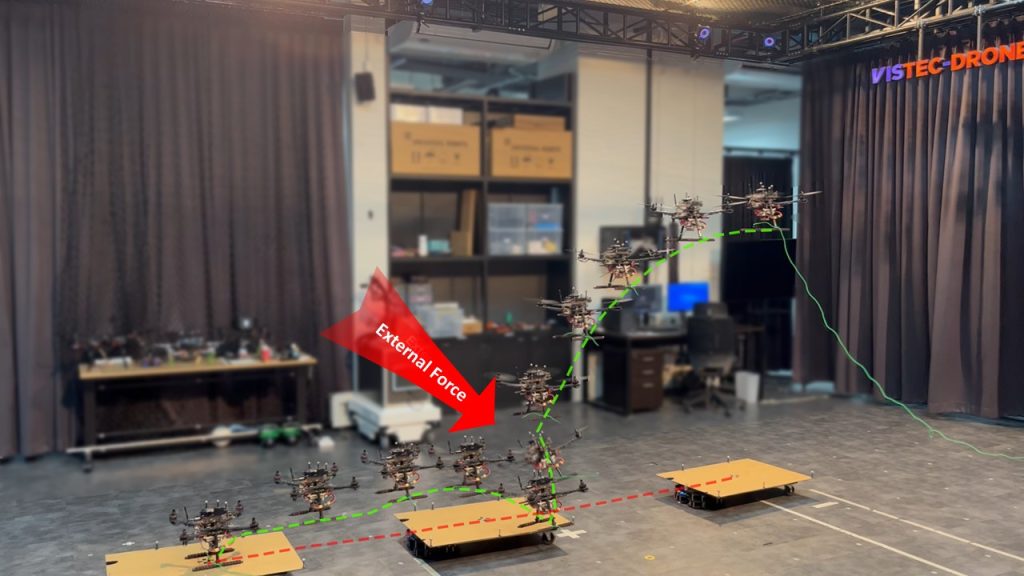
In this work, we address the challenges of robust precision landing maneuvers for a quadrotor on both stationary and moving ground targets in the presence of disturbances that can cause the quadrotor to deviate from its desired trajectory, leading to maneuver failure. To overcome this, we propose a novel online adaptive trajectory planning approach based on the online temporal scaling adaptation of dynamic movement primitives (DMPs). This adaptation enables the desired trajectory to be dynamically adjusted in response to tracking errors and the goal’s state. Consequently, our proposed approach enhances accuracy, precision, and safety during landing maneuvers. The effectiveness of the approach is evaluated through comprehensive experiments conducted in both physical simulations and real-world environments, covering various disturbance scenarios.
Reference: K. Rothomphiwat, P. Jaroonsorn, P. Kriengkomol and P. Manoonpong, “Robust Precision Landing of a Quadrotor with Online Temporal Scaling Adaptation of Dynamic Movement Primitives,” 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, United Arab Emirates, 2024, pp. 3130-3137, doi: 10.1109/IROS58592.2024.10801311.
2023
A Versatile, Modular, Multi-Legged Robot Platform for Complex Terrains
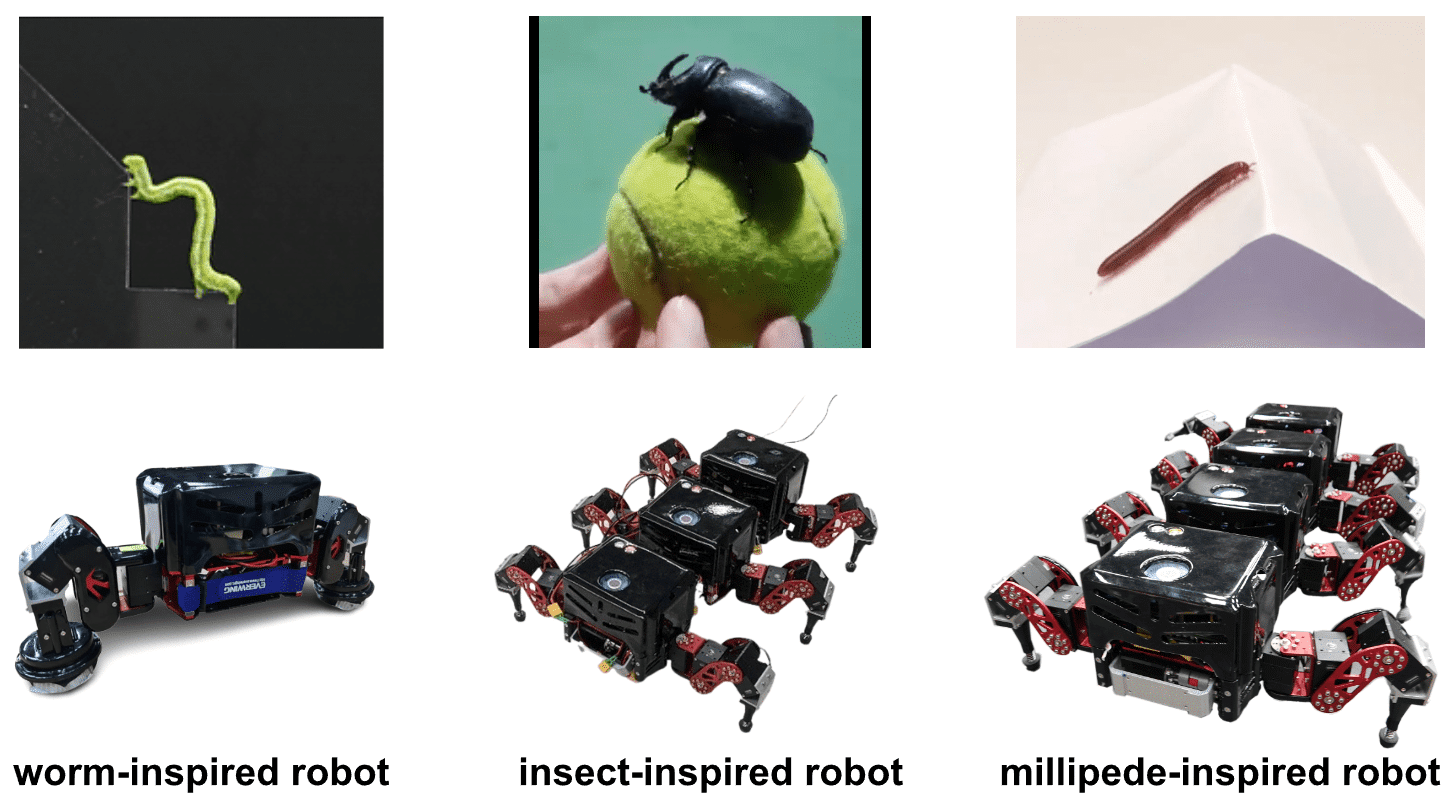
Reference: Chuthong, T., Homchanthanakul,J., Leung, B., Pewkliang, S. and Manoonpong, P. (2023) FreeLander: A Versatile, Modular, Multi-Legged Robot Platform for Complex Terrains, the 26th issue of the International Conference Series on Climbing and Walking Robots and the Support Technologies for Mobile Machines, Florianópolis, Brazil, during 02-04 October 2023
(Innovation Award 2023- For Practical Innovation in the Field of Robotics (Winning)
Adaptive Bipedal Robot Walking on Industrial Pipes Under Neural Multimodal Locomotion Control: Toward Robotic Out-Pipe Inspection
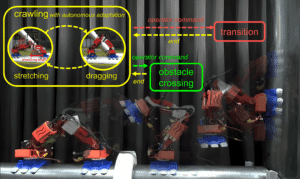
Out-pipe inspection robots encounter challenges in balancing on curved surfaces while moving fast, climbing horizontal and vertical pipes with limited energy, overcoming obstacles, like flanges, and performing stable transition between pipe segments. However, existing robots have yet fully achieved such multimodal locomotion effectively. Therefore, this work presents a novel adaptive bipedal robot and neural multimodal locomotion control toward semiautonomous robotic out-pipe inspection. The locomotion control utilizes eight analyzable neural modules forming a modular structure. Their integration can generate multimodal locomotion with online adaptation of the robot. Taking high-level commands from an operator, such as direction and behavior selection (crawling, obstacle crossing, and transition), the robot autonomously adapts its body posture to balance on pipes, resulting in 100% successful locomotion on horizontal and vertical smooth pipes conducted in our studies. These behaviors are achieved with a speed of 10.24 cm/s, and a cost of transport of 26.3 J/kgm, showing over 200% improvement in terms of speed and energy efficiency compared to existing state-of-the-art out-pipe legged inspection robots. Besides, the robot can overcome obstacles up to 14 cm in height (48% of its height) and perform stable transitions between horizontal and vertical segments. With this level of robustness and efficiency, it has the potential for out-pipe inspection in the oil and gas industry.
For more details, see our research paper here
2022
Neural Control and Online Learning for Speed Adaptation of Unmanned Aerial Vehicles
Unmanned aerial vehicles (UAVs) are involved in critical tasks such as inspection and exploration. Thus, they have to perform many intelligent functions. To implement such functions, different control approaches have been proposed. Most classical UAV control approaches, such as model predictive control, require a dynamic model to determine the optimal control parameters. Other control approaches use machine learning techniques that require multiple learning trials to obtain the proper control parameters. All of these approaches are computationally expensive. Our goal is to develop an efficient control system for UAVs that does not require a dynamic model and allows them to learn control parameters online with only a few trials and inexpensive computation. To achieve this, we developed a neural control method with fast online learning. Neural control is based on a three-neuron network, while the online learning algorithm is derived from a neural correlation-based learning principle with predictive and reflexive sensory information. This neural control technique is used here for speed adaptation of the UAV. The control technique relies on a simple input signal from a compact optical distance measurement sensor that can be converted to predictive and reflexive sensory information for the learning algorithm. Such speed adaptation is a fundamental function that can be used as a part of other complex control functions, such as obstacle avoidance. The proposed technique was implemented on a real UAV system. Consequently, the UAV can quickly learn within 3-4 trials to proactively adapt its flying speed to brake at a safe distance from the obstacle or target in horizontal and vertical planes. This speed adaptation is also robust against wind perturbation. We also demonstrated a combination of speed adaptation and obstacle avoidance for UAV navigation, which is an important intelligent function toward inspection and exploration.
For more details, see our research paper here.
Electromagnetic Feet with Soft Toes for Adaptive, Versatile, and Stable Locomotion of an Inchworm-Inspired Pipe Crawling Robot
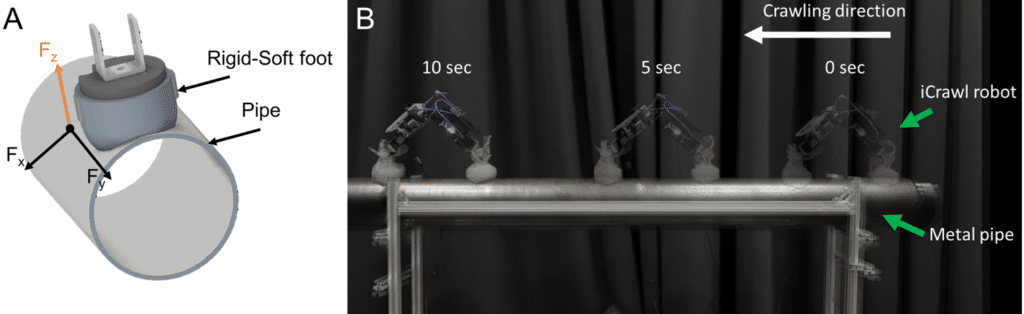 Feet play an important role in the adaptive, versatile, and stable locomotion of legged creatures. Accordingly, several robotic research studies have used biological feet as the inspiration for the design of robot feet in traversing complex terrains. However, so far, no robot feet can allow legged robots to adaptively, versatilely, and robustly crawl on various curved metal pipes, including flat surfaces for pipe inspection. To address this issue, we propose here a novel hybrid rigid-soft robot-foot design inspired by the leg morphology of an inchworm. The foot consists of a rigid section with an electromagnet and a soft toe covering for enhanced adhesion to a metal pipe. Finite element analysis (FEA), performed under different loading conditions, reveals that due to its compliance, the soft toe can undergo recoverable deformation with adaptability to various curved metal pipes and plain metal surfaces. We have successfully implemented electromagnetic feet with soft toes (EROFT) on an inchworm-inspired pipe crawling robot for adaptive, versatile, and stable locomotion. Foot-to-surface adaptability is provided by the inherent elasticity of the soft toe, making the robot a versatile and stable metal pipe crawler. Experiments show that the robot crawling success rate reaches 100% on large diameter metal pipes. The proposed hybrid rigid-soft feet (i.e., electromagnetic feet with soft toes) can solve the problem of continuous surface adaptation for the robot in a stable and efficient manner, irrespective of the surface curvature, without the need to manually change the robot feet for specific surfaces. To this end, the foot development enables the robot to meet a set of deployment requirements on large oil and gas pipelines for potential use in inspecting various faults and leakages.
Feet play an important role in the adaptive, versatile, and stable locomotion of legged creatures. Accordingly, several robotic research studies have used biological feet as the inspiration for the design of robot feet in traversing complex terrains. However, so far, no robot feet can allow legged robots to adaptively, versatilely, and robustly crawl on various curved metal pipes, including flat surfaces for pipe inspection. To address this issue, we propose here a novel hybrid rigid-soft robot-foot design inspired by the leg morphology of an inchworm. The foot consists of a rigid section with an electromagnet and a soft toe covering for enhanced adhesion to a metal pipe. Finite element analysis (FEA), performed under different loading conditions, reveals that due to its compliance, the soft toe can undergo recoverable deformation with adaptability to various curved metal pipes and plain metal surfaces. We have successfully implemented electromagnetic feet with soft toes (EROFT) on an inchworm-inspired pipe crawling robot for adaptive, versatile, and stable locomotion. Foot-to-surface adaptability is provided by the inherent elasticity of the soft toe, making the robot a versatile and stable metal pipe crawler. Experiments show that the robot crawling success rate reaches 100% on large diameter metal pipes. The proposed hybrid rigid-soft feet (i.e., electromagnetic feet with soft toes) can solve the problem of continuous surface adaptation for the robot in a stable and efficient manner, irrespective of the surface curvature, without the need to manually change the robot feet for specific surfaces. To this end, the foot development enables the robot to meet a set of deployment requirements on large oil and gas pipelines for potential use in inspecting various faults and leakages.
For more details, see our research paper here.
Video link of robot experiments:
2021
Chaotic Neural Oscillator for Navigation and Exploration of Autonomous Drones
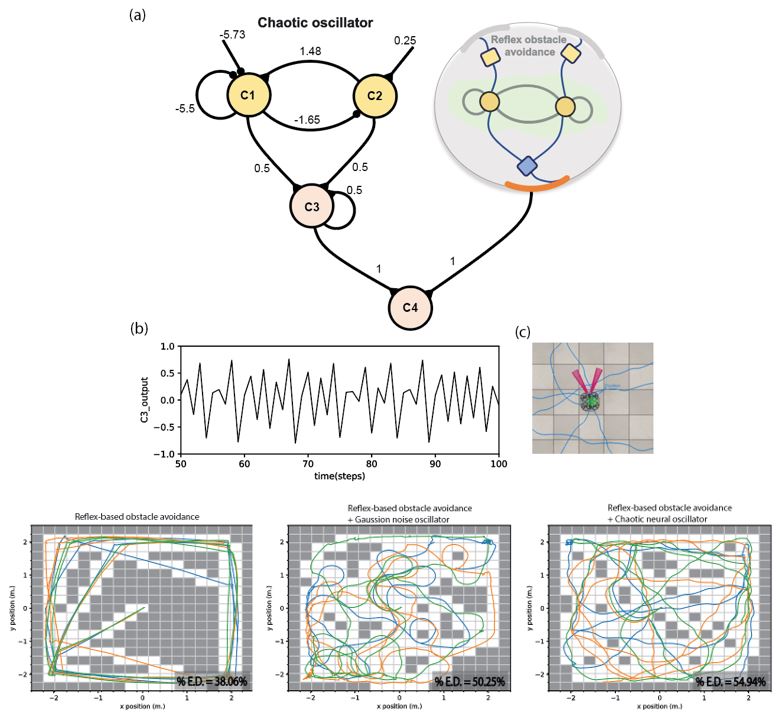
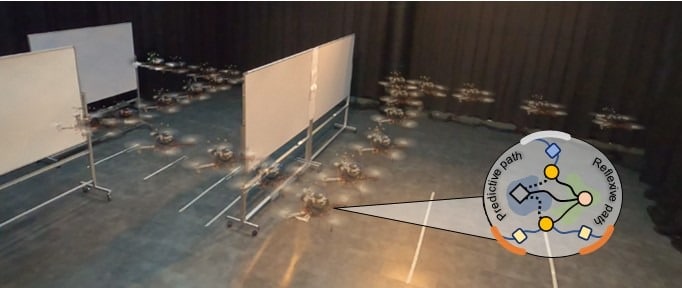
Efficient exploration in unknown environments (e.g., indoors, caves, and tunnels) is an important basic behavior of autonomous drones for complex missions (e.g., indoor exploration, search and rescue, and goal-directed navigation). In such missions, the drones need to explore the overall area as much as possible within a short or given period. Typically, exploration control uses (Gaussian) random walk. This control technique may lead to undesired behavior, such as overturning or looping. It causes the drone to repeatedly explore the same spots; thereby having difficulty covering the overall area. To overcome this problem, we propose here the use of a chaotic neural oscillator for efficient exploration of autonomous drones instead of Gaussian random walk. This technique is inspired by the chaotic (nonrandom) behavior of fruit flies, giving them efficient food searching. We combine the chaotic neural oscillator (acting as our exploration control module) with reflex-based neural control for obstacle avoidance. By doing so, the drone is able to autonomously
perform efficient exploration (covering the area larger than an exploratory random-walk strategy) in an autonomous and safe manner.
For more details, see our research paper here
Presentation Video link: https://youtu.be/ulbdMoYv3rQ
2020
iCrawl: An Inchworm-Inspired Crawling Robot for Pipe Inspection:

Inchworms use their morphology and evolved behaviors to crawl and climb various complex surfaces. This has inspired the development of different robots that can demonstrate similar capabilities for various applications such as the inspection of a complex environment. One of the key challenges in designing these robots is to enable them to be practically deployable with a compact design for providing continuous adaptability to a complex terrain such as an outer-pipe surface. Taking this into consideration, we present a new design for an inchworm-inspired crawling robot (iCrawl). The 5 DOF robot relies on two legs; each with an electromagnetic foot, in order to crawl on the metal pipe surfaces. The robot uses a passive foot-cap underneath an electromagnetic foot, enabling it to be a versatile pipe-crawler. The foot-cap design is an abstraction of the leg posture in an inchworm adapting to a round surface. The proposed foot-caps give the robot adaptability and stability for crawling on metal pipes of various curvatures. A state-machine based controller was developed to produce the required motor signals for the two inchworm-inspired crawling gaits: i) the step gait, and ii) the sliding gait. Both gaits were tested on the robot, eventually leading to it effectively crawling on the pipes and flat surfaces, climbing a metal wall and a pipe, and succeeding in obstacle avoidance during crawling. Experimental results also show that the robot has the ability to crawl on the metal pipes of various curvatures using the foot-caps and an appropriate gait. The robot can be used as a new robotic solution to assist close inspection outside the pipelines, thus minimizing downtime in the oil and gas industry.
For more details, see Khan, et al., IEEE Access, 2020.
Video link of robot experiments:
iCrawl: The robot autonomously crawling on the painted metal surfaces
iCrawl: The robot autonomously crawling on the non-painted metal surface
iCrawl: The robot autonomously climbing 90 deg inclided metal surfaces
iCrawl: The robot stepping over an obstacle in the tele-autonomous mode