Frontier Research Overview
How can we develop soft body and brain for intelligent motions and soft interactions?

To address this challenge, we investigate the effect of soft material on control, learning, and adaptation by introducing soft material into the rigid robot body or replacing the rigid parts with soft material. We also aim to identify the balance between the rigidness and softness of robot bodies for robust and versatile behaviors.
2025
Print-in-Place Tendon-actuated Gripper Based on Insect Tarsus for Versatile Object Grasping
Abstract: In gripper design, the aim of the field of soft robotics is to achieve grasping objects different in shape and size. However, operation cost and manufacturability hinder its development. This paper proposed a print-in-place tendon-actuated gripper (PiPTen), capable of grasping different objects while being economical owing to its design. This one-piece gripper is 3D-printed using thermoplastic polyurethane (TPU), which gives it the capability of rebounding back after being pulled by the string through elastic deformation. It has five segments linked by compliant notch joints where the bending occurs. The compliant property of the gripper allows it to be scaled to different sizes, thus increasing the range of objects the gripper can grasp. Furthermore, attaching adhesive pads on its surface increases adhesion to firmly grasp objects. Three different sizes of PiPTen were printed and evaluated for their performance in grasping different objects according to their weight and size.
References: R. L. Paderon, A. Harnkhamen, N. Asawalertsak and P. Manoonpong, “Print-in-Place Tendon-actuated Gripper Based on Insect Tarsus for Versatile Object Grasping,” 2025 IEEE International Conference on Robotics and Biomimetics (ROBIO), Chengdu, China, 2025, pp. 1876-1882, doi: 10.1109/ROBIO66223.2025.11376158.
For more details, see Paderon et al., ROBIO2025
A Ribbed Hybrid Rigid-Flexible Tail with Graded Stiffness and Anisotropic Friction for Enhanced Robot Locomotion and Fall Damage Prevention
Abstract:
Lizards are capable of climbing stably on various terrains. Their tails are key to this ability. The lizard uses its flexible tail with graded stiffness as a fifth limb and climbing aid. The tail also enables soft landings, preventing injury from falls. Inspired by this, tails have been incorporated into many climbing robots to enhance their mobility, mimicking lizards. These robotic tails are generally classified as either rigid (stiff) or flexible (soft). A rigid tail can provide a large preload for pitch-back prevention but has a limited contact area for surface adhesion to avoid sliding backward on slopes. In contrast, a flexible tail conforms to the terrain’s contours, increasing the contact area and thereby improving surface adhesion. However, it provides limited preload. Therefore, in this study, we propose a novel hybrid rigid-flexible robotic tail (HIFLEX) that achieves a balanced combination of preload and contact area. The tail structure design features double-sided inclined ribs and is divided into three modular segments (base, middle, and tip), with graded stiffness decreasing progressively from the base to the tip. The asymmetric (inclined) ribbed structure allows the tail to generate anisotropic friction, resulting in high adhesion (tail-to-surface attachment) to prevent backward sliding and low friction (tail-to-surface release) to facilitate upward climbing. The proposed tail is attached to a climbing robot via an actuator capable of pressing the tail downward to generate sufficient preload. The experimental results demonstrate that this unique tail enhances the robot’s climbing performance on rough and deformable slopes while preventing damage to the robot during falls.
References: P. Borijindakul, A. Khaheshi, T. Phetpoon, H. Rajabi and P. Manoonpong, “A Ribbed Hybrid Rigid-Flexible Tail with Graded Stiffness and Anisotropic Friction for Enhanced Robot Locomotion and Fall Damage Prevention,” 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025, pp. 1757-1763, doi: 10.1109/IROS60139.2025.11247392.
For more details, see Borijindakul et al., IROS2025
LITHE-joint: Variable Stiffness Compliant Spherical Contact Joint in an Under-Actuated System
Abstract: The concept of morphological computation (MC) is applied in the robotics field to improve the design and reduce the complexity of control systems. The MC uses mechanical intelligence, where stiffness properties play an important role as constraints to enhance system flexibility and to store elastic energy. This can reduce the number of required actuators. According to the MC principle, This work proposes LITHE joint: variable stiffness compliant spherical contact joint in an under-actuated system. This compact design for a 2 degrees of freedom (DOF) compliant spherical contact joint with controllable stiffness uses a pneumatic artificial muscle (PAM). This joint requires only one PAM actuator to control stiffness in a 2-DOF system, achieving a stiffness of up to 0.38 Nm/rad with a bandwidth of 0.1967 Nm/rad. With its variable stiffness properties, the joint is able to adapt its bending behavior, enabling energy redistribution of torque and angle. The modulation of torque and bending angle is governed by joint stiffness and the passive body dynamics. The benefits of the passive, compliant joint with a variable stiffness property are demonstrated by using as the spine of an under-actuated robot, controlling the passive bending of the body and the robot’s walking direction using the adjustable stiffness.
References: S. Punapanont, R. Janna, H. Sison and P. Manoonpong, “LITHE-joint: Variable Stiffness Compliant Spherical Contact Joint in an Under-Actuated System,” 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025, pp. 5228-5235, doi: 10.1109/IROS60139.2025.11247107.
For more details, see Punapont et al., IROS2025
Performance consequences of information-based centralization arising from neural and mechanical coupling in a walking robot
Abstract: Legged animals still outperform many terrestrial robots due to the complex interplay of various component subsystems. Centralization is a potential integrated design axis to help improve the performance of legged robots in variable terrain environments. Centralization arises from the coupling of multiple limbs and joints through mechanics or feedback control. Strong couplings contribute to a whole-body coordinated response (centralized) and weak couplings result in localized responses (decentralized). Rarely are both mechanical and neural couplings considered together in designing centralization. In this study, we use an empirical information theory-based approach to evaluate the emergent centralization of a hexapod robot. We independently vary the mechanical and neural coupling through adjustable joint stiffness and variable coupling of leg controllers, respectively. We found an increase in centralization as neural coupling increased. Changes in mechanical coupling did not significantly affect centralization during walking, but did change the total information processing of the neuromechanical control architecture. Information-based centralization increased with robotic performance in terms of cost of transport and speed, implying that this may be a useful metric in robotic design.
Reference: E. Liu, N. Asawalertsak, S. Sponberg and P. Manoonpong, “Performance consequences of information-based centralization arising from neural and mechanical coupling in a walking robot,” 2025 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Hangzhou, China, 2025, pp. 10295-10302, doi: 10.1109/IROS60139.2025.11246366.
For more details, see Liu et al., IROS2025
Adaptive Neural Control with Online Learning and Short-Term Memory for Adaptive Soft Crawling Robots
Abstract: Soft-bodied crawling animals exhibit efficient and adaptive behaviors resulting from the synergy between morphological computation (e.g., a flexible soft body and anisotropic skin) and neural computation (e.g., neural control with plasticity and short-term memory (STM)). However, applying these principles to soft crawling robots remains challenging. To address this, our study proposes an adaptive neural control system that incorporates online learning and STM to generate adaptive behaviors in soft crawling robots. This control system was implemented in a robot with a flexible soft body, anisotropic abdominal denticles or skin, and embodied laser and flex sensors. The robot demonstrated a multilevel adaptation to various perturbations. Perturbations, such as rough terrain, can be managed through passive (body) adaptation via micro-deformation of the denticles and macro-deformation of the body. Larger perturbations, including being lifted or pressed, crawling through confined spaces, and traversing slopes, are handled by active (neural control) adaptation. The robot can learn new behaviors, such as crawling through confined spaces, and store sensory information to maintain the learned behavior robustly, even in the temporary absence of sensory feedback. In addition, it can estimate its state through sensory feedback prediction, detect abnormal states through prediction errors, and adapt its behavior to address these errors.
Reference: Asawalertsak, N., & Manoonpong, P. (2025). Adaptive Neural Control with Online Learning and Short-Term Memory for Adaptive Soft Crawling Robots. IEEE Robotics and Automation Letters.
For more details, see Asawalertsak et al., ieee , 2025.
2024
S-BUN: Soft Bifunctional Utility Module for Robot Sensing and Signaling
Abstract: Conventional approaches in robotics for perceiving the environment and signaling the robot’s state or intention for human-robot interaction involve the use of separate sensing and signaling systems. This can sometimes result in high costs and complex system installations. In this study, we propose an alternative approach, integrating both robot sensing and signaling mechanisms into a single utility module (called S-BUN, Soft Bifunctional Utility module for robot sensing aNd signaling). Soft material (Ecoflex 00-10 silicone) is used to form its bun-like structure with a central cavity filled with a NaCl solution. Inspired by honeycombs, the module’s surface incorporates a hexagonal pattern to enhance structural robustness. The design of S-BUN enables it to function as a sensor for both non-contact proximity and touch sensing, utilizing the NaCl solution. Additionally, it serves as a signaling mechanism to indicate the robot’s state through the active inflation and deflation dynamics of the module, simulating lifelike breathing patterns. Through our experiments, we present S-BUN’s capabilities in proximity and touch sensing, including its ability to discern various touch intensities. Finally, we demonstrate the application of S-BUN in the context of reactive behavioral control for a crawling robot and human-robot interaction scenarios.
Reference: S. Mahuttanatan, N. Asawalertsak, J. Paripurana, K. Tarapongnivat, T. Chuthong and P. Manoonpong, “S-BUN: Soft Bifunctional Utility Module for Robot Sensing and Signaling,” 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, United Arab Emirates, 2024, pp. 10932-10938, doi: 10.1109/IROS58592.2024.10801310.
2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)
2023
A small soft-bodied crawling robot with electromagnetic legs and neural control for locomotion on various metal terrains
Abstract: Soft-bodied crawling animals (like caterpillars and inchworms) exploit their active soft bodies with passive adaptability to achieve efficient locomotion and move on multiple terrains. While several research studies have used this principle for robot development, most existing caterpillar/inchworm-inspired soft robots can still crawl on specific terrain (flat, inner, or outer pipes). To advance state-of-the-art soft robotic technology, we propose here a small soft-bodied crawling robot with electromagnetic legs and passive body adaptation. The robot is driven by neural central pattern generator (CPG)-based control. Due to the combination of its actively contractable/extendable body, passively adaptable interconnected body joints, and electromagnetic legs, the robot can successfully crawl on a variety of metal terrains, including a flat surface, step, slope, confined space, and an inner (concave surface) and outer (convex surface) pipe in both horizontal and vertical directions. Additionally, it can be steered to navigate through a cluttered environment with obstacles. Using the CPG-based control method, the robot’s locomotion speed can be simply regulated by changing a single CPG-frequency control parameter. This small soft robot has the potential to be employed as a robotic system for inner and outer pipe inspection and confined space exploration in the oil and gas industry.
Reference: Asawalertsak, N., Nantareekurn, W., Manoonpong, P. (2023) A small soft-bodied crawling robot with electromagnetic legs and neural control for locomotion on various metal terrains,the 6th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2023).
For more details, see Asawalertsak et al., RoboSoft , 2023.
Frictional Anisotropic Locomotion and Adaptive Neural Control for a Soft Crawling Robot
Abstract: Crawling animals with bendable soft bodies use the friction anisotropy of their asymmetric body structures to traverse various substrates efficiently. Although the effect of friction anisotropy has been investigated and applied to robot locomotion, the dynamic interactions between soft body bending at different frequencies (low and high), soft asymmetric surface structures at various aspect ratios (low, medium, and high), and different substrates (rough and smooth) have not been studied comprehensively. To address this lack, we developed a simple soft robot model with a bioinspired asymmetric structure (sawtooth) facing the ground. The robot uses only a single source of pressure for its pneumatic actuation. The frequency, teeth aspect ratio, and substrate parameters and the corresponding dynamic interactions were systematically investigated and analyzed. The study findings indicate that the anterior and posterior parts of the structure deform differently during the interaction, generating different frictional forces. In addition, these parts switched their roles dynamically from push to pull and vice versa in various states, resulting in the robot’s emergent locomotion. Finally, autonomous adaptive crawling behavior of the robot was demonstrated using sensor-driven neural control with a miniature laser sensor installed in the anterior part of the robot. The robot successfully adapted its actuation frequency to reduce body bending and crawl through a narrow space, such as a tunnel. The study serves as a stepping stone for developing simple soft crawling robots capable of navigating cluttered and confined spaces autonomously.
Reference: Asawalertsak, N., Heims, F., Kovalev, A., Gorb, S. N., Jørgensen, J., & Manoonpong, P. (2023). Frictional anisotropic locomotion and adaptive neural control for a soft crawling robot. Soft Robotics, 10(3), 545-555.
For more details, see Asawalertsak et al., Soft Robotics, 2023.
2021
VENOM: Versatile, Adhesive, and Soft Material for Various Surface Adhesion
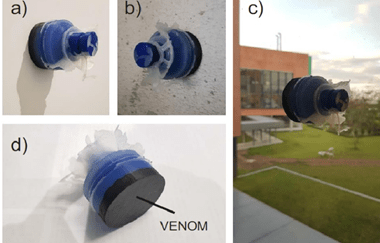
Abstract: We propose for the first time a versatile, adhesive, and soft material for various surface adhesion (VENOM). It has been developed based on a mixture of super-soft, fast cure platinum-catalyzed silicone (Ecoflex 00-10) and iron powder. Through our empirical investigation, we realized that VENOM with iron powder in the amount of 30% by weight of silicone produced the highest dynamic friction and normal adhesion forces compared to other ratios. We compared the performance of VENOM with other soft (sticky) materials (e.g., other silicone types and non-directional gecko-inspired material) on smooth and rough surfaces. Our experimental results show that VENOM overall has an excellent performance. It has the highest dynamic friction and adhesion forces on both surfaces, except in the case of smooth surfaces where the gecko-inspired material has the highest normal adhesion force. Although the adhesion force of VENOM on smooth surfaces is lower than the gecko-inspired material, several tests show that it has a lower variance. This suggests that VENOM has better repeatable adhesive performance and durability. We believe that this simple, low-cost, dry adhesive material will be beneficial in many aspects of (soft) robotics as well as climbing robot development.
Reference: Suthisomboon, T., Rukpanich, T., Asawalertsak, N., Borijindakul, P., Ji, A., Dai, Z., & Manoonpong, P. (2021, April). Venom: versatile, adhesive, and soft material for various surface adhesion. In 2021 IEEE 4th International Conference on Soft Robotics (RoboSoft) (pp. 543-546). IEEE.
For more details, see Suthisomboon et al., RoboSoft, 2021.
A video link of the VENOM experiments