AMOS
AMOS is a six-leg-robot that uses an “Adaptive neural locomotion control” to make a robot automatically learn and adjust its own movement in order to imitate a movement of the real cockroach such as an obstacle avoidance and walk through a rough terrain.
MORF

MORF is a six-leg robot uses a “Neural control” to construct a pattern of an insect movement. This robot uses a Dynamixel (a digitizer volt motor for a robot), and ROS (Robot Operating System) Interface. In addition, this robot also has an “Artificial Hormone” system to help a robot adapts its own height respect to each stiffness of the terrain.
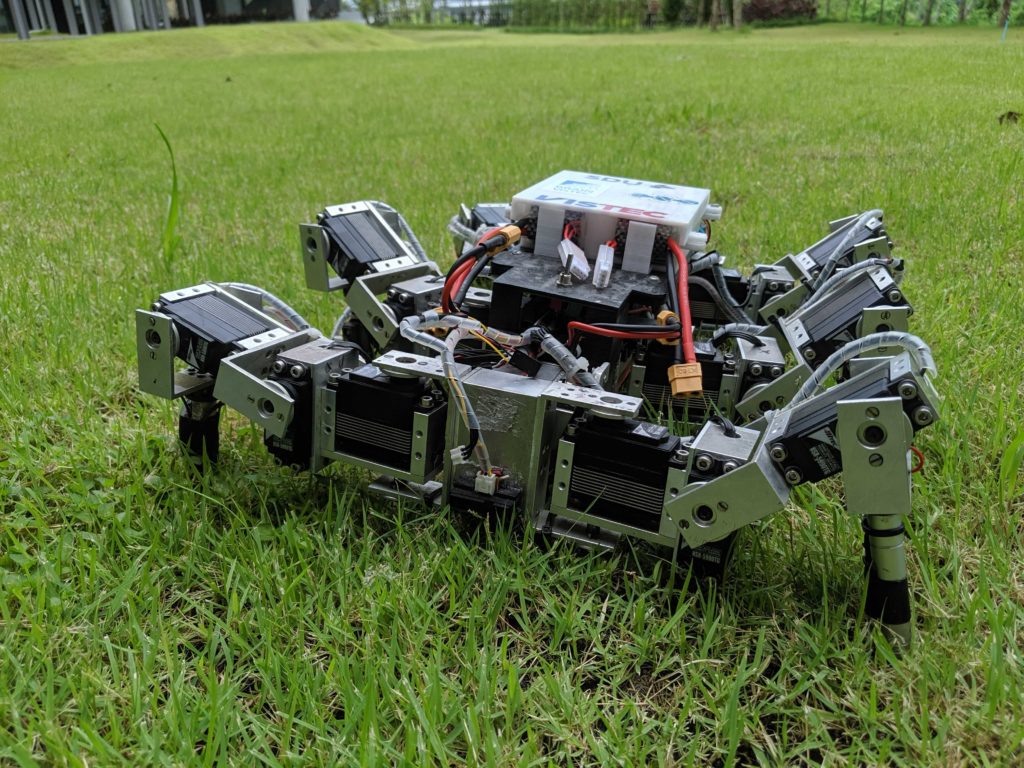
ALPHA

ALPHA is a dung beetle-like robot based on the functional morphology and biomechanics of the South African dung beetle Scarabaeus galenus. We aim to use this robot for studying the neural mechanisms underlying the dung beetle’s complex behaviors (such as versatile locomotion, object manipulation/transportation, large object rolling, orientation, goal-directed navigation, searching, and homing).
HEXA

Hexa by Vincross is a robot is an all-terrain robot equipped with functionalities including a Linux-based OS known as MIND, 720p cameras, 3-axis accelerometer, distance measuring sensor and infrared sensor. The robot is programmable using MIND SDK, and can also be controlled using the Sandboxed simulator and a mobile app. It can interact with the environment based on the uses of both optical and spatial sensors, and adapt its movement patterns for walking and climbing.
Bipedal robot
Bipedal robot is a two-leg robot which mainly uses a human movement as an inspiration for an Exo-skeleton development. This aim of the robot is to aids the patients who have an issue on their legs such as elder and disabled people. This robot uses a Central Pattern Generator (CPG) and also collaborates with a Brain Control Interface (BCI) which uses a brainwave to predict a movement of the human. This system enhances a robot for a movement prediction of the users.
iCrawl
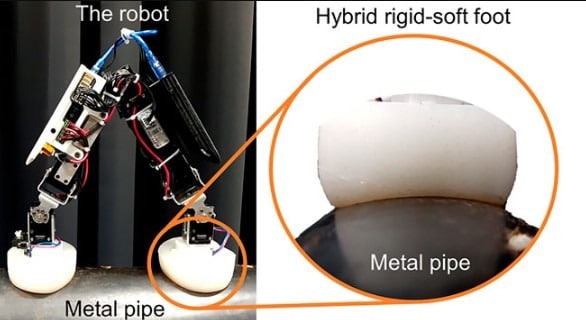
iCrawl is an inchworm-inspired crawling robot. The 5 DOF robot relies on two legs; each with electromagnetic feet with soft toes (EROFT), in order to crawl on the metal pipe surfaces. The foot design is an abstraction of the leg posture in an inchworm adapting to a round surface. Foot-to-surface adaptability is provided by the inherent elasticity of the soft toe. The proposed EROFT gives the robot adaptability and stability for crawling on metal pipes of various curvatures.
MOVO

MOVO is a mobile manipulator robot from Kinova Inc. It is a research robot that is mainly designed to help the researchers to fully understand, and study a potential approach of a mobile manipulation. This robot uses a ROS (Robot Operating System), MoveIt!, and Gazebo as a standard developing tools that helps the research to ease out the way to construct a general platform which can be adopted to the other type of the robots. A main objective of a MOVO is to make it automatically interact with human by using a combinatorial learning method to help a robot decide and react itself to the environments.
Dual-arm robot
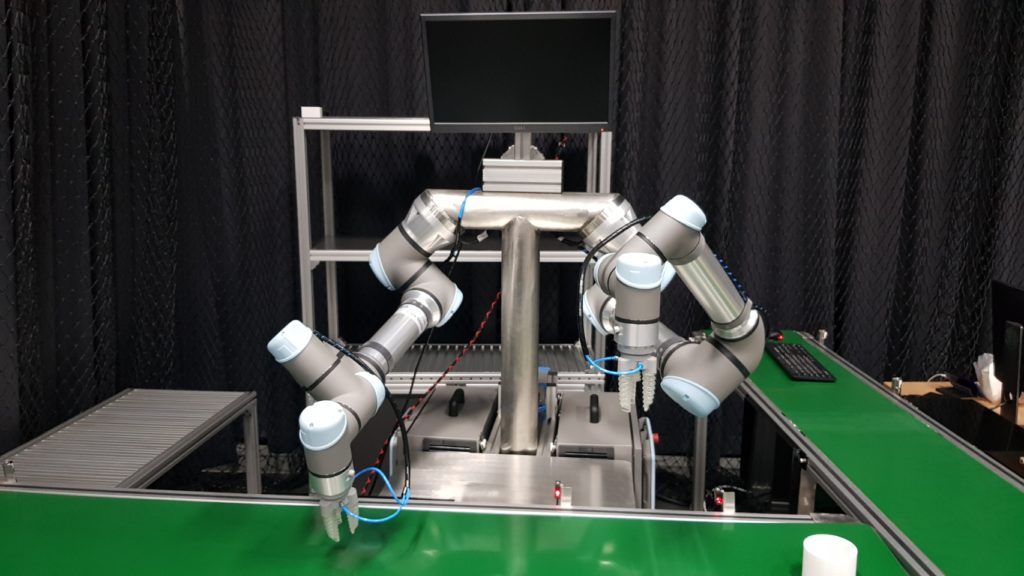
The dual-arm robot is made up of two Universal Robot’s robotic arms. It is used in industrial research since it contains two mechanical arms that function together but are controlled separately. A depth camera, a motion tracking sensor, and an infrared sensor are among the external sensors that the robot responds to order the two arms to work together, this robot employs a ROS (Robot Operating System) and MoveIt!
MIR robot
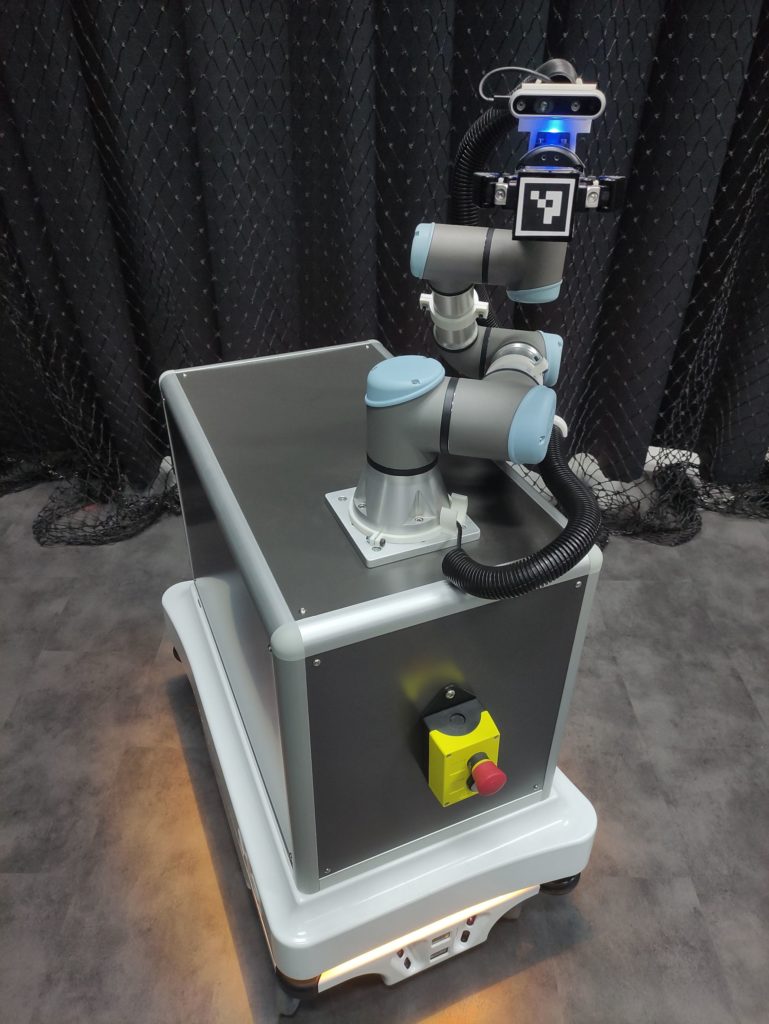
The MIR100 robot from Mobile Industrial Robots Inc. is a multifunctional mobile robot designed to improve productivity in logistics and manufacturing operations. We integrate it with the UR3e arm and other sensors to enhance performance not only in manufacturing but also in the research. The obstacle avoidance system, object detection, machine learning, and other features make it useful as a service task.
Turtlebot 3
TurtleBot is a ROS standard platform robot. It is suited for the ROS beginner due to the ease of implementation. In the research field, various prototype works can begin to develop on this robot. It has simple SLAM, navigation, and machine learning capabilities, all of which are essential for a mobile robot.
Medical robot
1) The mobile lower-limb exoskeleton: EXO-H3

Our mobile robotic lower-limb exoskeleton system is “EXO-H3” model from Technaid company, Spain. The main mechanical structure is based on aluminum and stainless steel with lightweight (~ 20 kg incl. battery). It has six degrees of freedom on hips, knees, and ankles actuated by electrical motors with harmonic drive gears. The system can do position, torque, and admittance (stiffness) control. Its proprioceptive sensors comprise joint position, interaction torque, and heel&toe pressure sensor. The control unit can do wired or wireless (Bluetooth, WiFi) communication with CAN protocol.
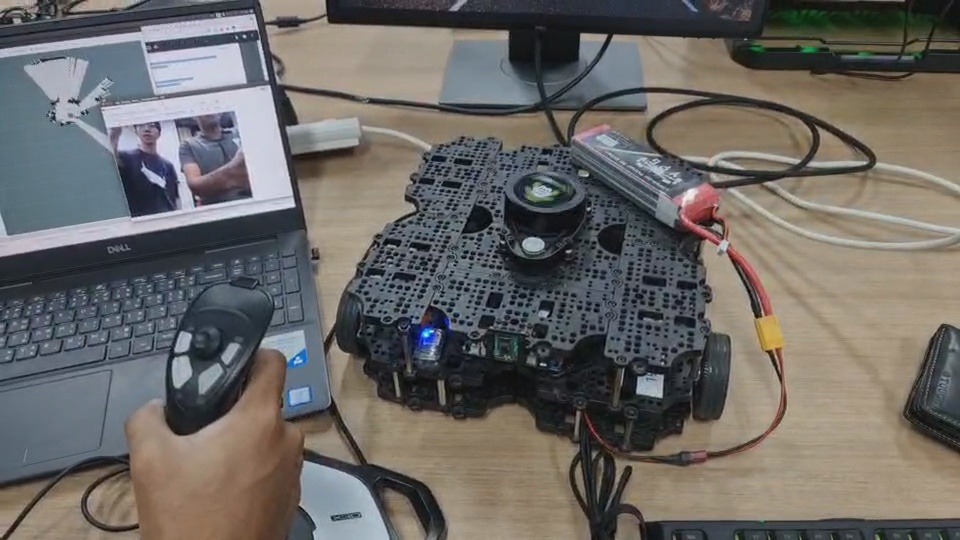
Drones
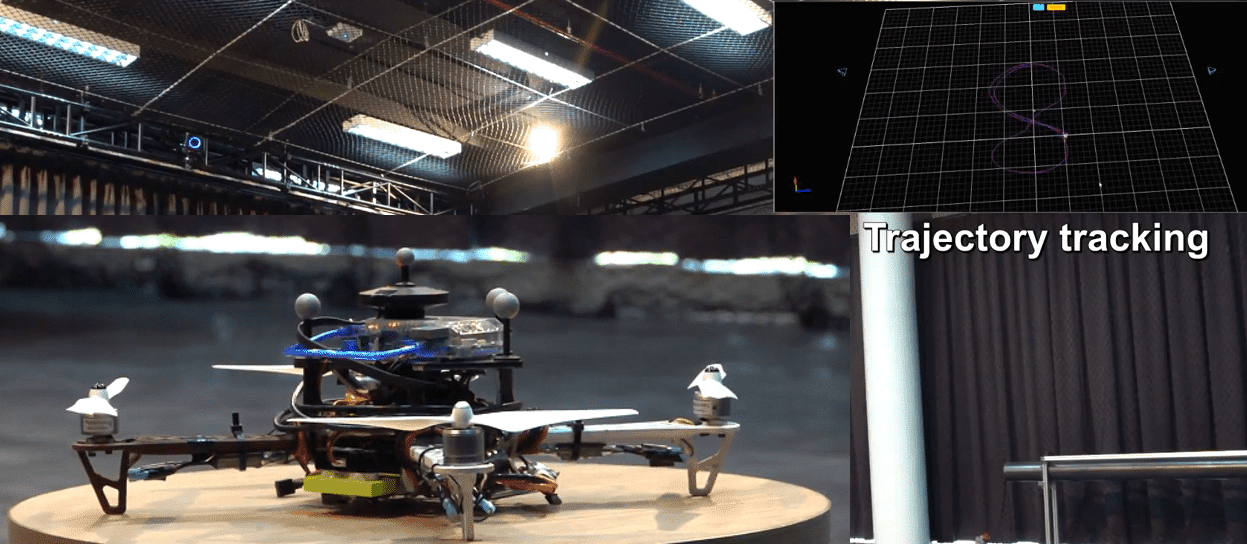
Our drone research platform is based on the Pixhawk flight control system together with the MAVROS package to enables MAVLink extendable communication between computers running ROS. Our drone hardware is a quadrotor which consists of frame sizes F260, F450, S500, and Tarot 650. The research focus of our team is autonomous navigation, effective exploration, and intelligent transportation systems for building up the autonomous inspection robot system. Additionally, there are many research facilities in our lab such as OptiTrack (motion capture camera), RealSense T265 tracking camera, LiDAR lite, Leddar Vu8 Segmented LiDAR, and FLIR thermal imaging camera Duo R.
Black Mirror
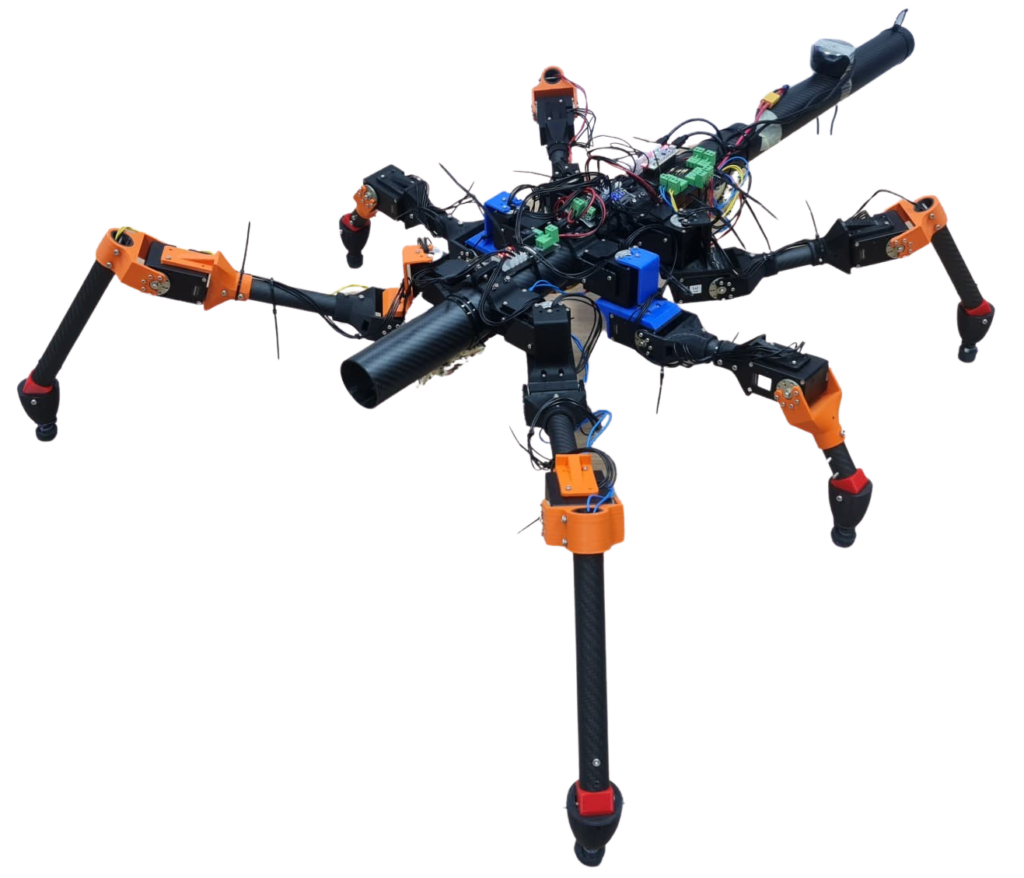
Black Mirror is a stick insect-like robot based on the functional morphology and biomechanics of the Annam stick insect Medauroidea extradentata. We aim to use this robot for studying the neural mechanisms underlying decentralized adaptive neural control. The robot was constructed according to the dimension of a real stick insect but on a larger scale (approximately seven times larger than the real stick insect). It consists of 18 Dynamixel XH540-W270-R servomotors and six foot contact sensors (force sensitive resistor (FSR) sensors). Each motor can deliver 9.9 N.m stall torque and provide several forms of proprioceptive feedback.
Unitree B1 : Quadruped Robot

The Unitree B1 robot is a quadruped robot designed for industrial and research applications. It offers:
- All-weather operation: Reliable performance in various environmental conditions.
- High payload capacity: Supporting heavy loads with robust structural design.
- Extensive expansion capabilities: Allowing for the integration of additional sensors and tools.
- Multi-dimensional perception: Equipped with advanced sensors for precise situational awareness.
- Versatile scene adaptability: Capable of navigating diverse environments with ease.
- Powerful computing capabilities: Enabling real-time data processing and decision-making.
This industrial-grade quadruped robot meets the demands of complex environments and advanced industrial applications, offering efficient and intelligent solutions. At our lab, the Unitree B1 serves as a versatile research platform, supporting studies in complex locomotion and adaptive robotics.
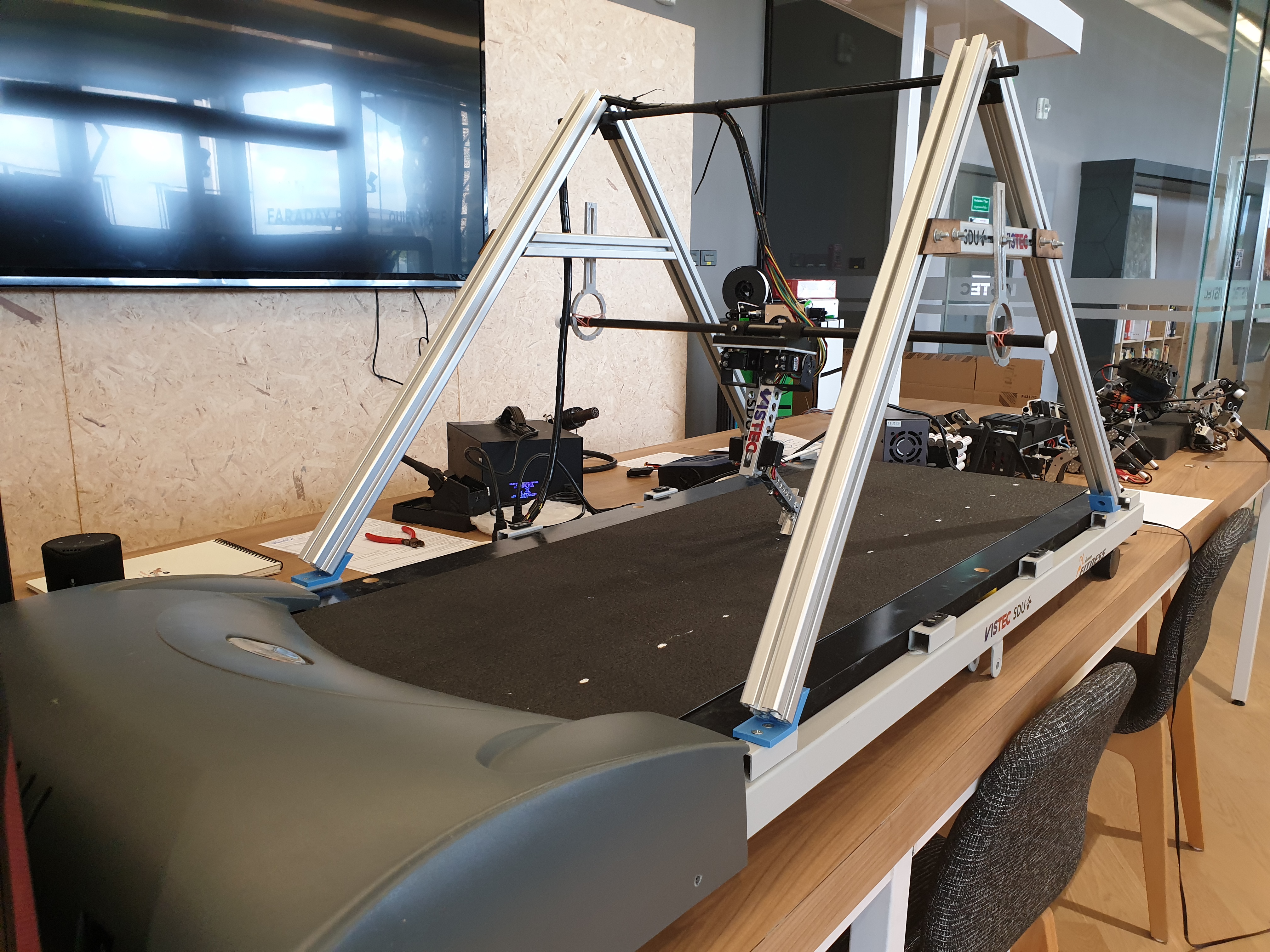
Freelander robot (2-legged robot)

FreeLander is funded by PTTEP and runs from 2020-2021. FreeLander aims to develop robot motion control technology with high computational efficiency, adaptivity, and versatility. It will be based on the functionality of biological brains which combine multiple mechanisms. The mechanisms include neural control, online correlation-based learning, forward model, and artificial hormones. Each of them will be created as a module or a building block which can be integrated as a modular control structure. The resulting control technology (called bio-inspired intelligent motion control) will be able to apply to different limbed robots (e.g., two, six, eight legs) to allow them to perform adaptive, (semi) autonomous, agile, and versatile locomotion for successfully navigating in extreme 3D environments (like, large convex (out pipe), large concave (in pipe), complex curvature, uneven terrain, etc). The success of the project would be a basis for further development of pipe inspection robots towards an intelligent robotic inspection system for complex operations and all PTTEP in-pipe and out-pipe inspection tasks which will be much benefit in the oil and gas industry.