How can we create service robots that can effectively interact, communicate, and adapt to users for seamless service tasks, such as human guidance and delivery?

Research Highlights
2024
Visual-based Adaptive Object-Robot Interaction of a Mobile Service Robot:

Inspired by the idea of human nature to use a tray to deliver the object, we developed the Visual-Based Adaptive Interaction System (hereinafter “VAIS”), a novel learning system, to improve service delivery using visual information and a fast neural learning mechanism. Within this system, the robot learns the optimal angular rotational and linear translational moving speeds to effectively transport objects placed on a tray without an extra holder. The robot validates these learnt movements by successfully completing multiple-object delivery tasks along designated routes.
For more details, see Puchong et al., Adaptive Behavior, 2024.
Related Link:
2021
Interface for Communicating Person Identity to a Robot:
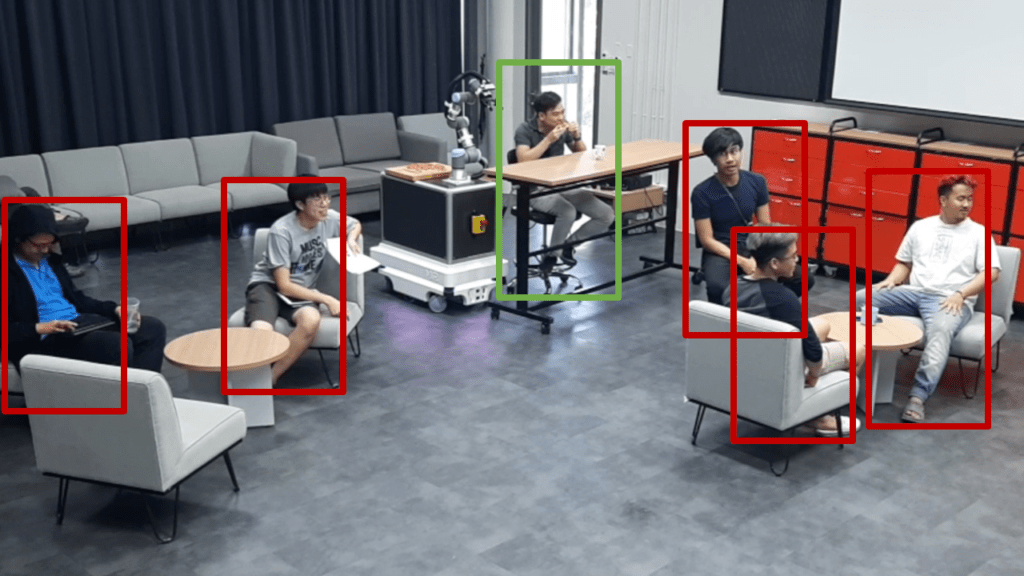
A conventional adopted method for operating a waiter robot is based on the static position control, where pre-defined goal positions are marked on a map. However, this solution is not optimal in a dynamic setting, such as in a coffee shop or an outdoor catering event, because the customers often change their positions. We explore an alternative human-robot interface design where a human operator communicates the identity of the customer to the robot instead. Inspired by how human communicates, we propose a framework for communicating a visual goal to the robot, through interactive two-way communications.
For more details, see Sawadwuttikul et al., IEEE Transactions on Industrial Informatics, 2021.
Video Link: