![]()
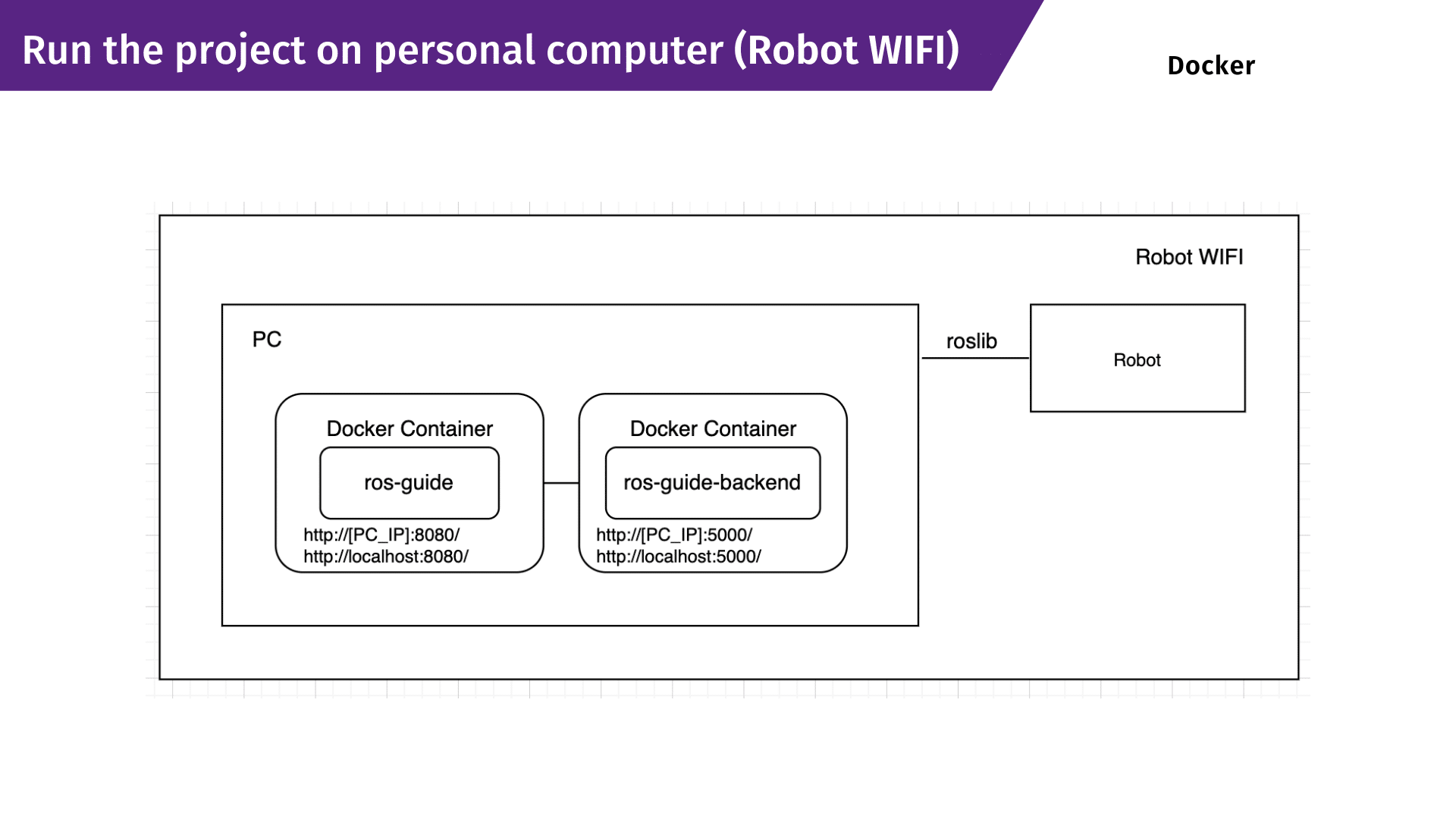
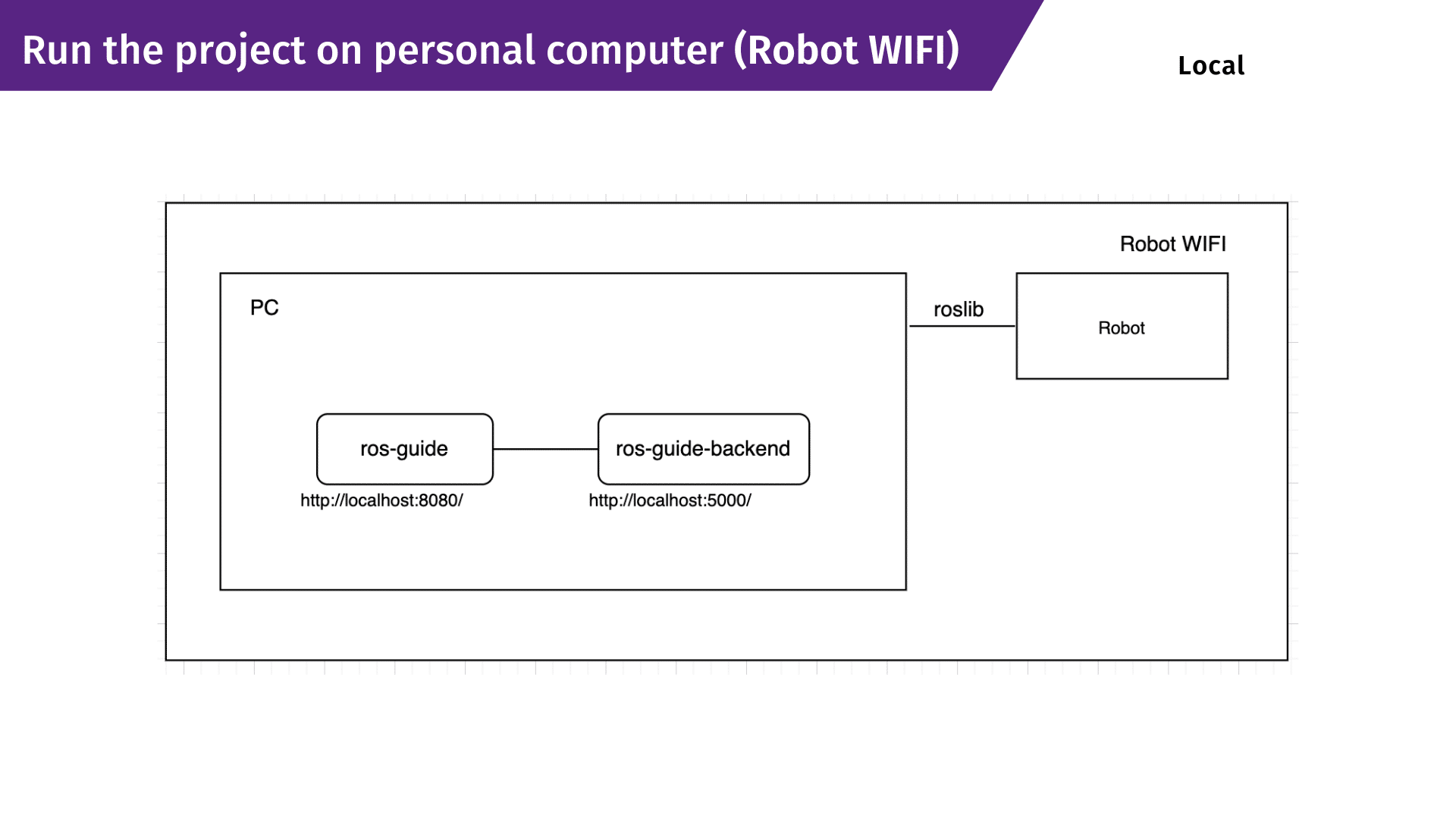
ROS-GUIDE is a web browser tool for communicating and controlling robots via ROS. The interaction between the browser and ROS uses roslibjs with the WebSockets as an intermediary.
GitLab: https://gitlab.com/BRAIN_Lab/Biorobotics/vlib/tools/ros-guide
GitHub-IST-Robotics: https://github.com/orgs/VISTEC-IST-ROBOTICS-PUBLIC/repositories
Features
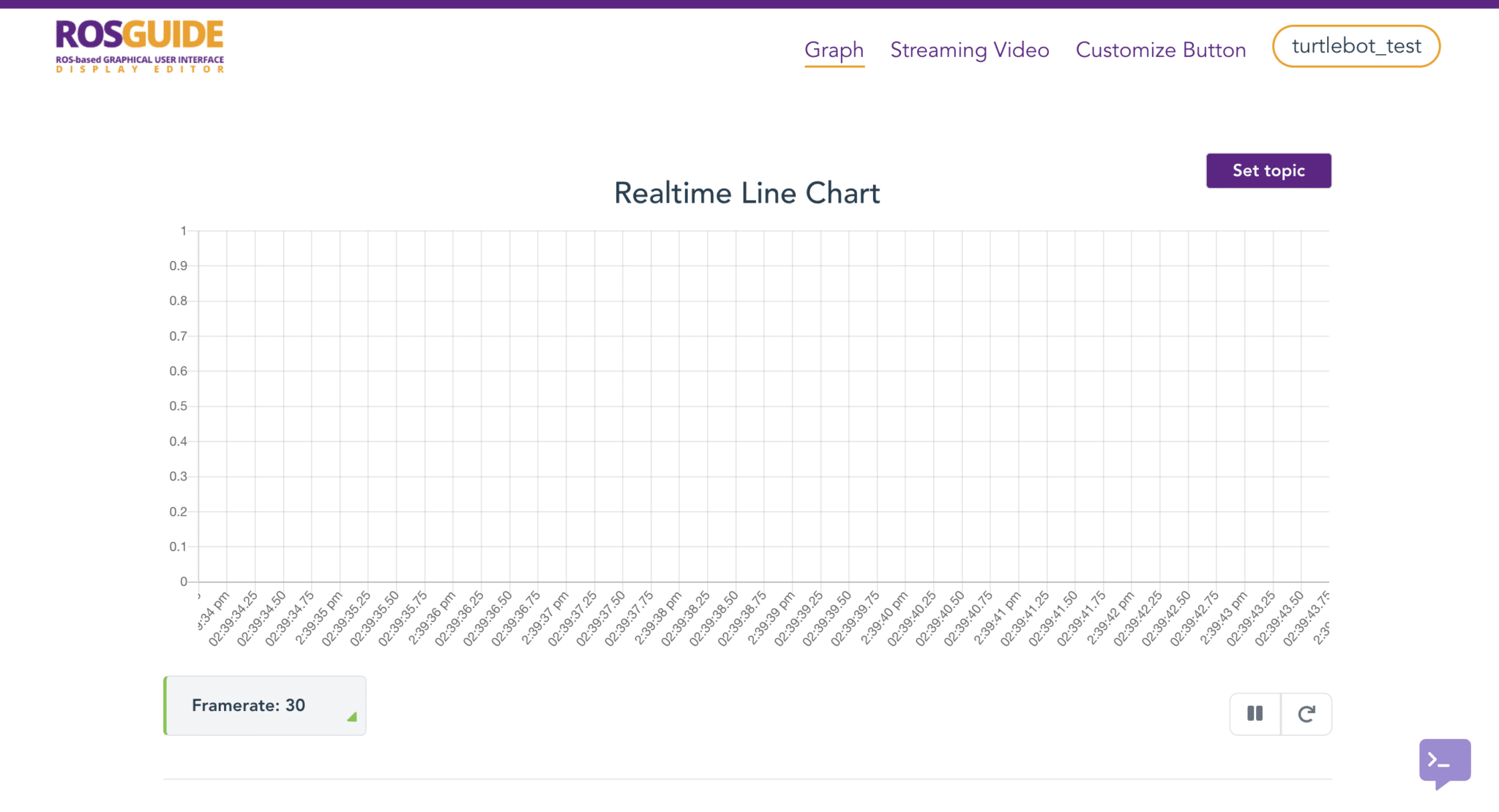
Realtime graph
- Line Graph: Display values from selected ROS topics on a line graph in real-time.
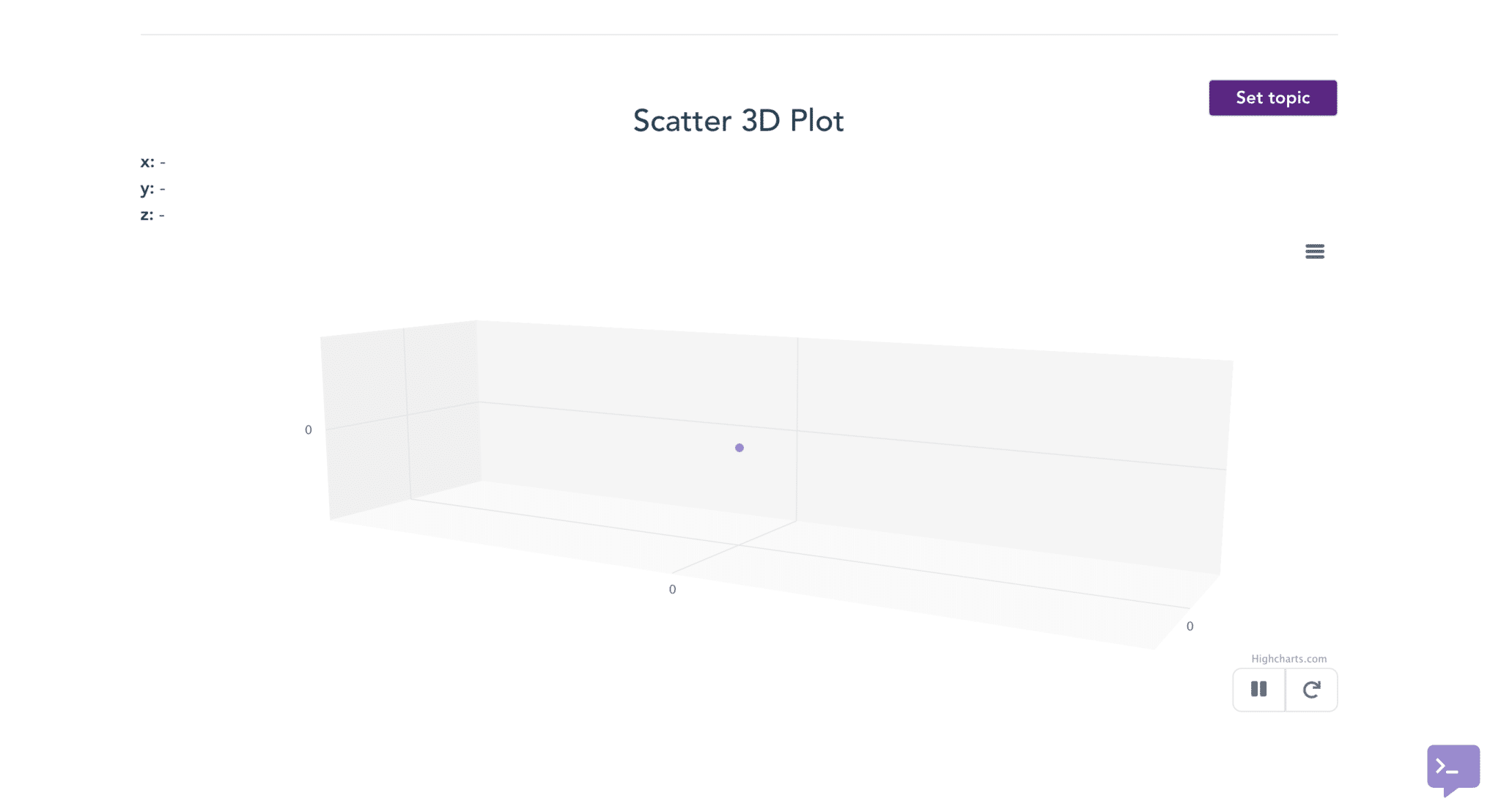
- Scatter Plot: Uses dots to display the relationship between three sets of topic values.
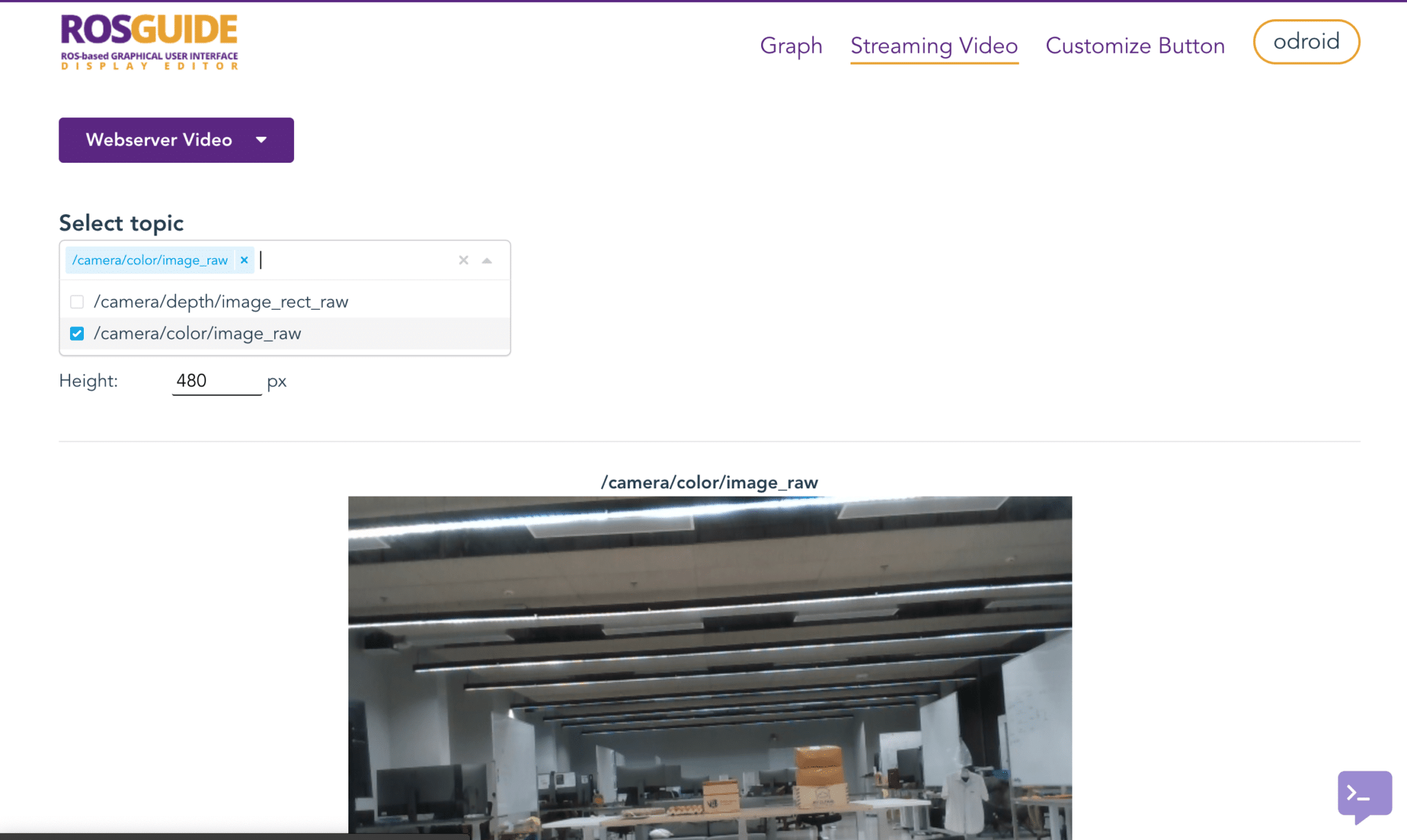
Streaming video
Stream video of ROS image topic by using web_video_server or streaming port that robot provides the video.
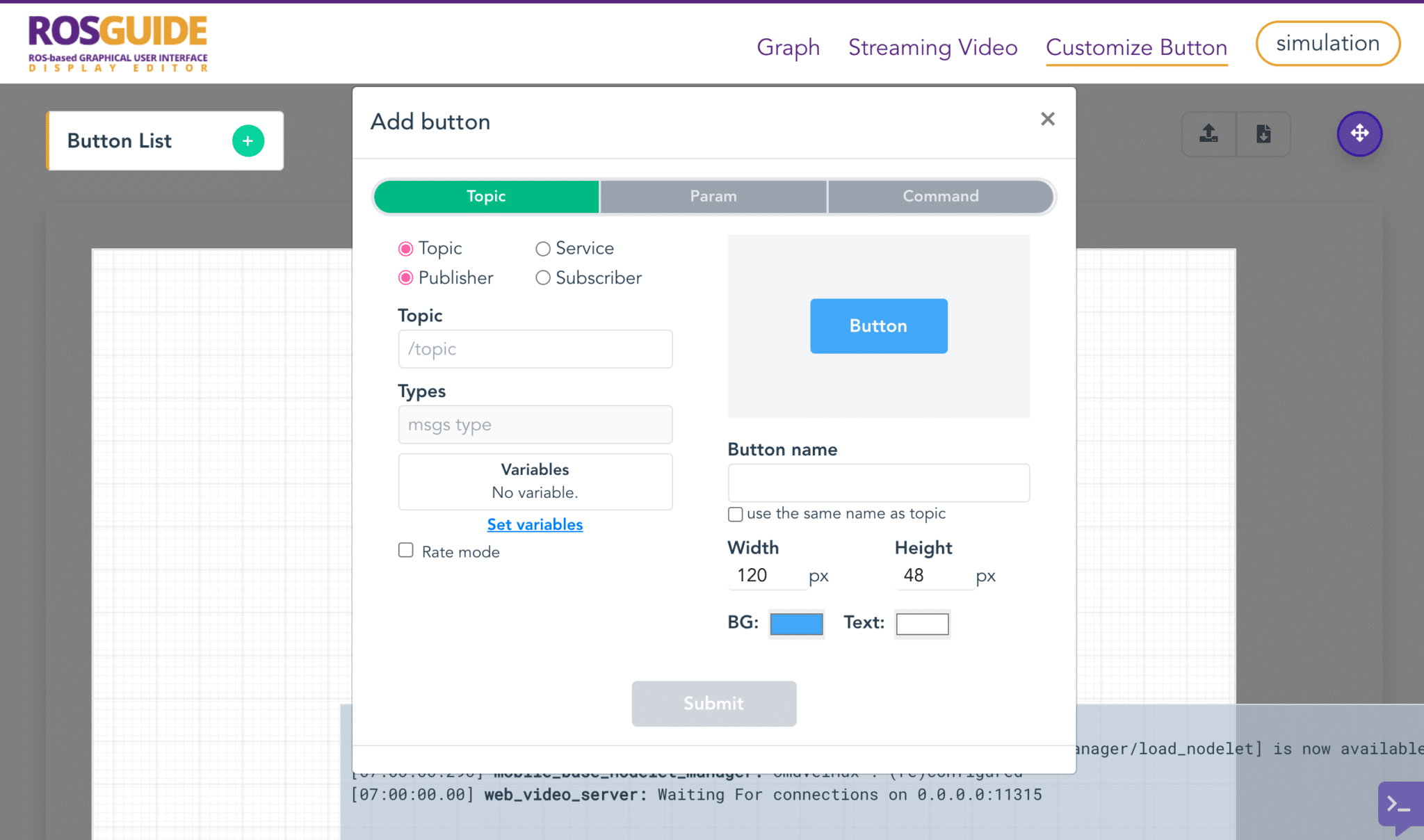
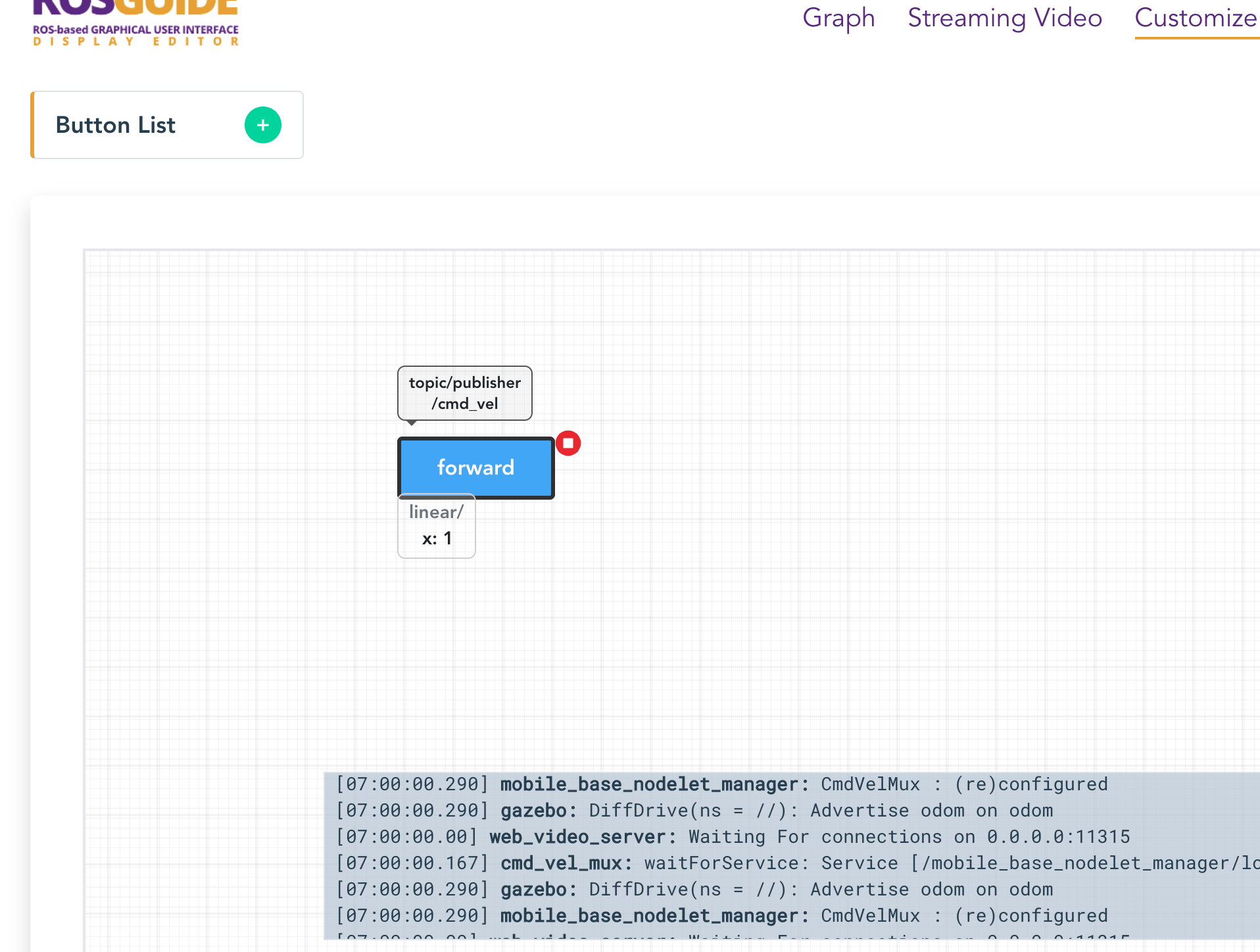
Customize button
Create and customize buttons to control or subscribe robot. It consists of the following tools:
- rostopic: including publishers, subscribers, and publishing rate.
- rosservice: call the service with the provided values.
- rosparams: including set and get ROS parameter.
- command: run commands to the robot.