On September 18 – 20, 2024, Prof. Poramate Manoonpong and Dr. Jettanan Homchanthanakul participated in the SWARM2024 Conference, held at Kyoto University, Japan. The conference focuses on the latest advancements in swarm intelligence, robotics, and collective behavior, drawing researchers from around the world.
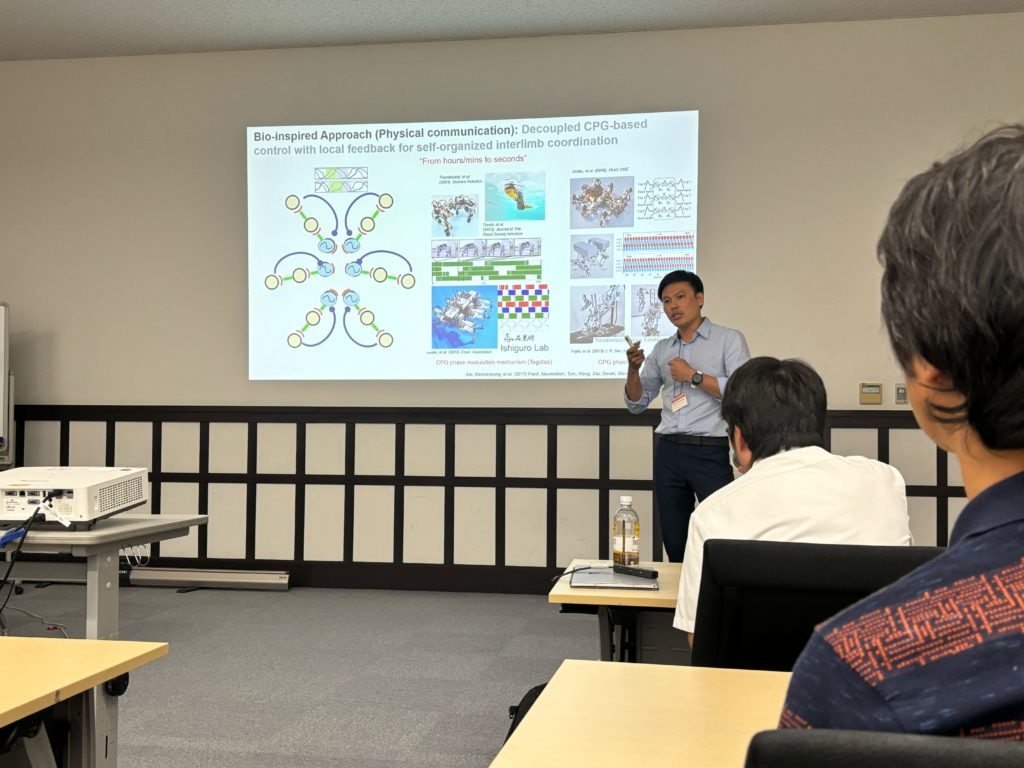
During the event, Prof. Poramate organized a workshop titled “Embodied Locomotion Mechanisms in Animals and Robots: From Morphological to Neural Computations”, where he shared insights into the integration of morphology and neural systems in robotic and animal locomotion.
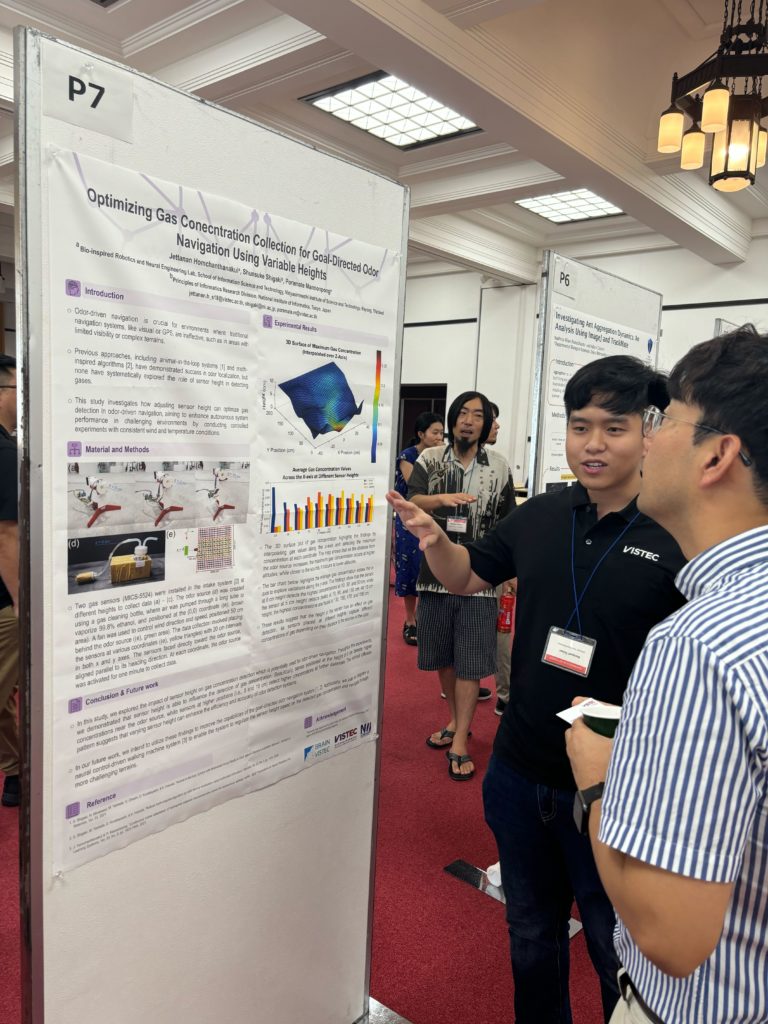
Dr. Jettanan attended the poster session and presented research on “Optimizing Gas Concentration Collection for Goal-Directed Odor Navigation Using Variable Heights,” a collaborative project between VISTEC and Assist. Prof. Shunsuke Shigaki from NII. This work highlights innovative approaches to odor navigation using variable heights, offering valuable contributions to the field of robotic exploration.