
Official website: https://exovis.vistec.ac.th/
The EXOVIS project funded by VISTEC aims to extend the exoskeleton technology with advanced control for individuals developed by VISTEC and validate it with subjects at Ramathibodi Hospital (RAMA) and the Physical Therapy department (PTMU) (end users). We expect that the outcome of this project will reach TRL6 (i.e., technology demonstrated in relevant environment). This EXOVIS project is an intermediate step to reach TRL9 (i.e., actual system proven in operational environment) or a commercialization stage.
The project has been separated into 3 work packages (WP):
WP1: Exoskeleton and Control Algorithm – VISTEC
The mobilized lower-limb exoskeleton research platform (Exo-H3) was extended and tested in VISTEC-GAIT at VISTEC. The intelligent control algorithms (e.g., personalized, multimodal, and synchronization algorithms) were developed here and applied to the exo enabling it to learn and assist a subject. A computer station communicated wirelessly (through a local network) with an edge-computing computer attached to the exo via ROS 1 protocol. All control and feedback signals (e.g., joint angle, joint current, joint interaction torque, foot contact) were streamed to a recording computer via MQTT protocol and to a GAIT computer to synchronize the exo with the lab equipment such as a treadmill. During the development period, all computers operated on Ubuntu 20.04.
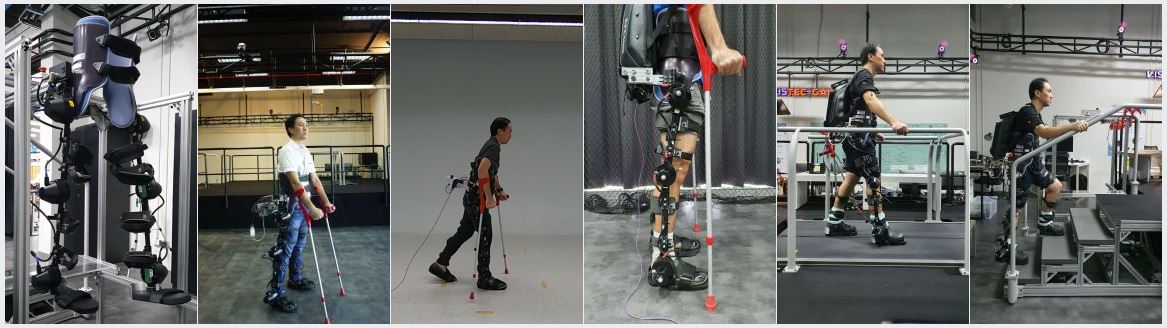
Later, the whole exo platform was validated at hospitals with healthy subjects to acquire comments on both hardware and software aspects.
Publications related to this section are as the following:
WP2: The Development of An Exoskeleton System for Assisting and Enhancing Patients’ mobility – Orthopedic department, Ramathibodi Hospital
The platform was validated to see how our intelligent control algorithms performed compared to the default control from the factory. The performance metrics measured within the gait lab were muscle activity, metabolic rate, and spatiotemporal information. The functionality and comfortability of using our platform were measured by a questionnaire.

Publications related to this section are as the following:
[1] Supapitanon K, Patathong T, Akkawutvanich C, Srisuchinnawong A, Ketrungsri W, et al. (2025) Comprehensive multi-metric analysis of user experience and performance in adaptive and non-adaptive lower-limb exoskeletons. PLOS ONE 20(1): e0313593. https://doi.org/10.1371/journal.pone.0313593.
WP3: Exoskeleton for Gait Rehabilitation in Individuals with Movement Deficit – Faculty of Physical Therapy, Mahidol University
The platform was also validated in the second gait lab at Mahidol University with different subject groups, in this case, a physiotherapist. Mainly, muscle activity, spatiotemporal information, functionality, and comfortability were investigated.
