Frontier Research Overview
“The ability to restore and improve movements for individuals with walking difficulty is extremely crucial to improve the quality of their life.”

From this point of view, we focus on developing an adaptive biologically-inspired control mechanism with fast real-time online adaptation of an exoskeleton system to achieve adaptive, dynamic, and robust user-exoskeleton interaction. This will result in natural and energy-efficient walking of patients as well as multiple gait generation for walking on a level floor, walking up/downstairs, and walking on uneven terrain.
Research Highlights
2025
Comprehensive multi-metric analysis of user experience and performance in adaptive and non-adaptive lower-limb exoskeletons
Abstract:
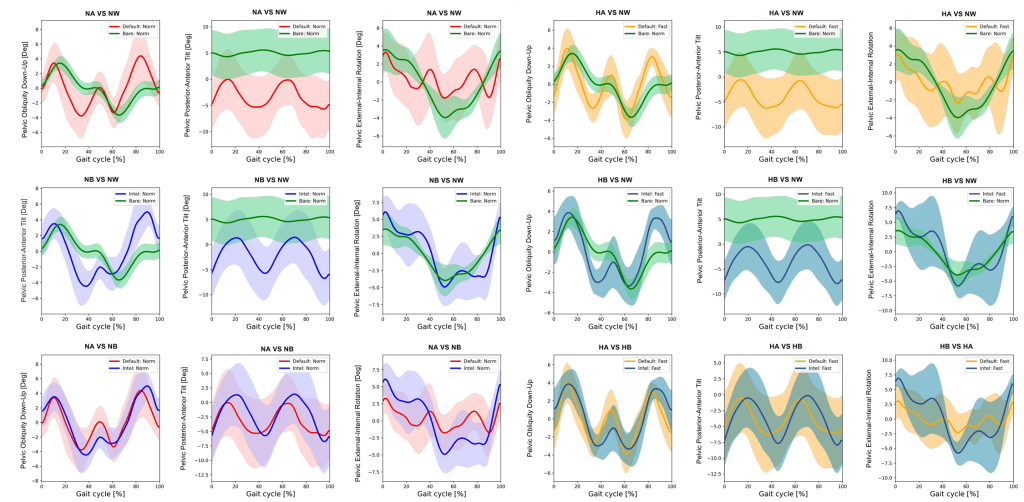
Among control methods for robotic exoskeletons, biologically inspired control based on central pattern generators (CPGs) offer a promising approach to generate natural and robust walking patterns. Compared to other approaches, like model-based and machine learning-based control, the biologically inspired control provides robustness to perturbations, requires less computational power, and does not need system models or large learning datasets. While it has shown effectiveness, a comprehensive evaluation of its user experience is lacking. Thus, this study addressed this gap by investigating the performance of a state-of-the-art adaptive CPG-based exoskeleton control system (intelligent mode) under a multi-metric analysis (involving three-dimensional gait analysis, muscle activity, oxygen consumption, user comfort, and exoskeleton performance scores) and comparing it to a standard commercial exoskeleton control system (default mode). A cross-over design with randomized allocation in Thai healthy and independently walking adults ensured participants experienced both modes. All participants were assigned into two groups to receive an alternate sequence of walking with the intelligent mode or the default mode of the lower-limb exoskeleton Exo-H3 at high and normal speed. From eight participants, the intelligent mode-driven exoskeleton (adaptive exoskeleton) showed a significantly lower velocity, stride, and step lengths than the default mode-driven exoskeleton (non-adaptive exoskeleton). This setup significantly increased anterior pelvic tilt during mid-swing at normal speed (3.69 ± 1.77 degrees, p = 0.001) and high speed (2.52 ± 1.69 degrees, p = 0.004), hip flexion during stance phase with ankle dorsiflexion, and used less oxygen consumption at high speed (-2.03 ± 2.07 ml/kg/min) when compared to the default one. No significant differences of muscle activity, user comfort and exoskeleton performance scores between the two modes. Further exoskeletal modification in terms of hardware and control is still needed to improve the temporal spatial, kinematics, user comfort, and exoskeleton performance.
Paper:
Supapitanon K, Patathong T, Akkawutvanich C, Srisuchinnawong A, Ketrungsri W, et al. (2025) Comprehensive multi-metric analysis of user experience and performance in adaptive and non-adaptive lower-limb exoskeletons. PLOS ONE 20(1): e0313593. DOI: 10.1371/journal.pone.0313593.
https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0313593
S-DOT: Soft Dot-Structured Surface Pattern for Enhanced Grip and Comfort in Exoskeleton Straps
Abstract:
In exoskeleton leg strap applications, maintaining a reliable and enhanced grip, particularly under varying con- ditions, remains an ongoing challenge. Conventional ethylene- vinyl acetate (EVA) foam solutions, while offering some degree of comfort, often fail to provide consistent grip stability, especially when exposed to moisture or oil. To address this limitation, this study investigates an alternative solution using a combination of soft materials, such as silicone and surface pattern design. These patterns are meticulously crafted to optimize load distribution and minimize high-pressure points without compromising grip efficiency. Through comprehensive experiments and analysis under dry, moist, and oily condi- tions, we compare the performance of the proposed silicone- patterned straps against traditional EVA foam straps. The results reveal that the soft dot-structured surface pattern (S- DOT) silicone with a dot pattern significantly outperforms EVA foam, exhibiting the lowest slip distance (<10 mm) and showcasing its potential as a simple but effective anti-slip solution for enhanced exoskeleton wearability. The findings of this study suggest a promising future for patterned silicone- based techniques in improving force dispersion and enhancing exoskeleton wearability in real-world scenarios.
Paper:
Mahuttanatan, S., Tarapongnivat, K., Asawalertsak, N., Akkawutvanich, C. and Manoonpong, P. 2025 S-DOT: Soft Dot-Structured Surface Pattern for Enhanced Grip and Comfort in Exoskeleton Straps. The 8th IEEE-RAS International Conference on Soft Robotics (RoboSoft 2025), accepted.
2024
BAMS: Binary Sequence-Augmented Spectrogram with Self-Attention Deep Learning for Human Activity Recognition
Abstract:
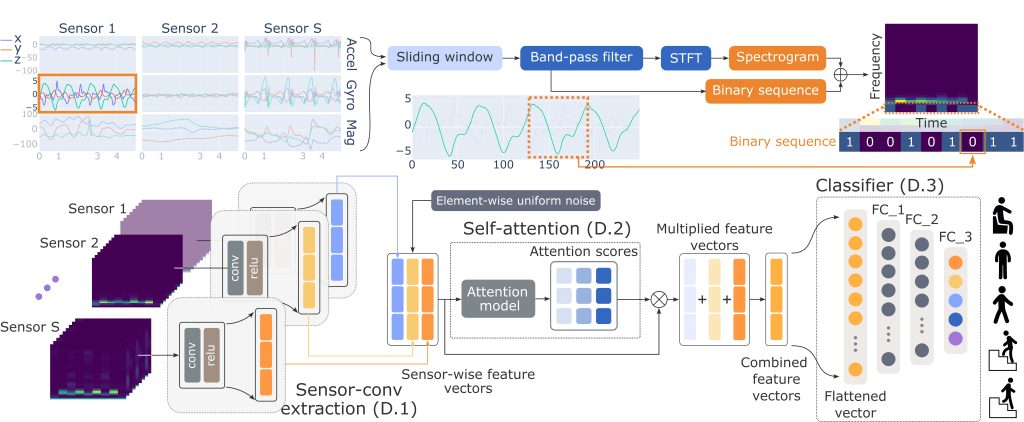
Human Activity Recognition (HAR) has rapidly gained interest over the years due to its wide range of applications in AI-based systems, particularly healthcare monitoring. HAR methods typically involve extracting relevant features from data provided by wearable sensors, smartphone sensors, cameras, or their combinations to classify different activities. Nevertheless, a major challenge lies in achieving high classification accuracy with limited data samples, particularly when distinguishing between activities with similar signal attributes. To address this challenge, we propose a novel HAR method called BinAry sequence-augmented spectrograM with Self-attention deep learning (BAMS). Our proposed method leverages only basic wearable sensor data. It utilizes short-time Fourier transform spectrograms to extract spatio-temporal sensor information. The spectrogram is integrated with a binary sequence that captures movement direction. We integrate a scaled dot-product self-attention mechanism into the model to prioritize data from wearable sensors, thereby enhancing the model’s performance. The proposed method is evaluated on a public dataset using leave-one-subject-out cross-validation for efficacy and robustness. The method is found to achieve significant improvement over other state-of-the-art methods with the classification accuracy percentage and weighted F-1 scores of 88.06±5.11 and 87.36±5.96, respectively, for a twelve-activity classification.
Paper:
N. Sricom, R. Charakorn, P. Manoonpong and T. Limpiti, “BAMS: Binary Sequence-Augmented Spectrogram with Self-Attention Deep Learning for Human Activity Recognition,” 2024 IEEE 20th International Conference on Body Sensor Networks (BSN), Chicago, IL, USA, 2024, pp. 1-4, doi: 10.1109/BSN63547.2024.10780593.
https://ieeexplore.ieee.org/document/10780593
Online Adaptive Impedance Control with Gravity Compensation for Interactive Lower-Limb Exoskeleton
Abstract:
While lower-limb exoskeletons have been increasingly used for gait assistance and rehabilitation, most of them continue to function as assistive devices in the exoskeleton-user relationship as a leader and follower. This limits the user’s ability to interactively contribute to gait control. Therefore, this study proposes an interactive user-exoskeleton control strategy to translate the exoskeletons into interactive compliant companion devices with the exoskeleton-user relationship as the collaborator. This strategy is implemented through online adaptive impedance control with gravity compensation (OAIC-GC). It relies solely on internal pose feedback (joint position) rather than external sensors such as electromyography, torque, or force, as utilized in other assist-as-needed (AAN) control methods. The OAIC-GC can automatically capture the mechanical impedance dynamics of the user’s lower limbs during walking and thus facilitate adaptive, versatile, and personalized gait assistance. It is evaluated using a real lower-limb exoskeleton system with six degrees of freedom (DOFs) across different users engaging in various activities. These activities include symmetrical and asymmetrical walking on a split-belt treadmill at different speeds, as well as walking up stairs. The results indicate a significant improvement in the exoskeleton’s performance in terms of adaptability and movement smoothness under all activities when compared to traditional control. The proposed control reduces joint assistance torque across all exoskeleton joints, enhancing user interaction and comfort. This enables users to actively control their gait patterns, enabling the exoskeleton to operate in an interactive assist-as-needed (IAAN) mode.
Paper:
R. Janna, K. Tarapongnivat, N. Sricom, C. Akkawutvanich, X. Xiong and P. Manoonpong, “Online Adaptive Impedance Control with Gravity Compensation for an Interactive Lower-Limb Exoskeleton,” 2024 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Abu Dhabi, United Arab Emirates, 2024, pp. 12793-12800, doi: 10.1109/IROS58592.2024.10802289.
https://ieeexplore.ieee.org/document/10802289
Adaptable Segmented Straps with Anti-slip Pads for Modular Assistive Knee Exoskeleton Enhancement
Abstract:
This paper introduces a modular assistive knee exoskeleton designed to enhance physical gait assistance. The exoskeleton is engineered to support flexion/extension motions of the knee joint to mitigate slippage across various activities (walking, sit-stand, and walking up-down stairs) and accommodate personalized adjustments. A specific design approach involving a flexible strap with an anti-slip pad feature is proposed to address these requirements. The results indicate that our design is more effective in maintaining its position than the traditional one in all testing activities and can reduce a peak torque at the extreme slipping position during walking by 47% compared to the traditional design. This research contributes to the advancement of assistive technologies for mobility support and offers insights into the practical implementation of modular exoskeleton systems.
Paper:
Tarapongnivat, K. et al. (2024). Adaptable Segmented Straps with Anti-slip Pads for Modular Assistive Knee Exoskeleton Enhancement. In: Berns, K., Tokhi, M.O., Roennau, A., Silva, M.F., Dillmann, R. (eds) Walking Robots into Real World. CLAWAR 2024. Lecture Notes in Networks and Systems, vol 1115. Springer, Cham. https://doi.org/10.1007/978-3-031-71301-9_25.
https://link.springer.com/chapter/10.1007/978-3-031-71301-9_25
VISTEC-GAIT: A Versatile Automated Gait Lab System for Closed-loop Robotic Exoskeleton Assisted Rehabilitation
Abstract:
This paper presents a versatile automated gait lab system architecture to solve the challenges of collaborating and communicating among multiple instruments operated in gait analysis and rehabilitation. Our results demonstrate that the system architecture efficiently facilitates collaboration and synchronization among multiple instruments with varying update frequencies, enabling the successful implementation of closed-loop robotic exoskeleton assistance.
Paper:
N. Sricom, W. Ketrungsri, C. Akkawutvanich and P. Manoonpong, “VISTEC-GAIT: A Versatile Automated Gait Lab System for Closed-Loop Robotic Exoskeleton Assisted Rehabilitation,” 2024 IEEE/SICE International Symposium on System Integration (SII)
https://ieeexplore.ieee.org/document/10417608
2023
EXOBIC: Intelligent Exoskeleton with Biofeedback for Advanced Rehabilitation, Stand-alone video
Abstract:
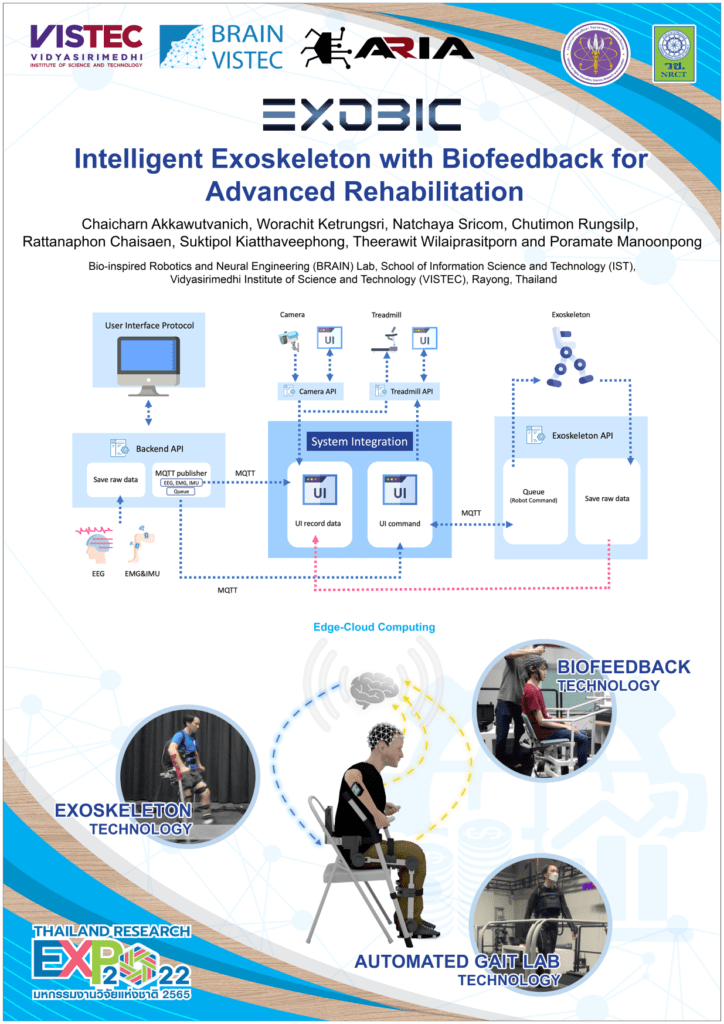
This video demonstrates early results of our developed EXOBIC system for advanced rehabilitation research. The EXOBIC system integrates lower-limb exoskeleton, biofeedback, and automated gait lab technologies. Our adaptive neural control with an automatic training process allows the exoskeleton to quickly learn and generate personalized gaits of individual subjects [1]. Biofeedback (such as brainwave signals and muscle electrical signals) from electromyography (EMG) and electroencephalography (EEG) sensors and monitored gait movement feedback from the automated gait lab are being integrated into the exoskeleton system to improve exoskeleton autonomy as well as human-exoskeleton coordination for the rehabilitation of moderately and severely damaged patients with neurological problems and strokes. Artificial neural networks with deep metric learning and a multi-task autoencoder (MIN2Net [2]) are developed for combining the multi-modal feedback information, while a wireless network is used for exoskeleton-biosensors-gait lab communications and edge-cloud computing. Wearable exoskeletons with biofeedback for gait rehabilitation are still in the early stages of development, and randomized control trials will be needed to show therapeutic efficacy. The introduced EXOBIC system can contribute to a journey of our robotics community for efficient gait rehabilitation and restoration of motor functions toward making robots for humans.
Paper:
Akkawutvanich, C.; Ketrungsri, W.; Sricom, N.; Rungsilp, C.; Chaisaen, R.; Kiatthaveephong, S.; Sitthiwanit, T.; Wilaiprasitporn, T.; Manoonpong, P. (2023) EXOBIC: Intelligent Exoskeleton with Biofeedback for Advanced Rehabilitation, Stand-alone video, 2023 IEEE International Conference on Robotics and Automation (ICRA)
Acknowledgement:
This study was supported by IST-Human centric automation technology of VISTEC (IST-DEMO, POM-Robotics 300/111500/221111500203)
References:
[1] Akkawutvanich, C. and Manoonpong, P., 2023. Personalized Symmetrical and Asymmetrical Gait
Generation of a Lower-limb Exoskeleton. IEEE Transactions on Industrial Informatics, DOI:
10.1109/TII.2023.3234619
[2] Autthasan, P., et al., 2021. MIN2net: End-to-end multi-task learning for subject-independent motor
imagery EEG classification. IEEE Transactions on Biomedical Engineering, 69(6), pp.2105-2118.
Neural Multimodal Control for Versatile Motion Generation and Continuous Transitions of a Lower-limb Exoskeleton
Abstract:
The paper proposes a neural multimodal control for versatile motion generation and continuous transitions between activities of a mobile lower-limb exoskeleton. The control method combines neural rhythmic oscillators as central pattern generators (CPGs) for basic rhythmic pattern generation and shaping networks using the radial basis function (RBF) networks to encode different demonstrated patterns e.g., sit-to-stand, climbing up the stairs, and walking on a level floor and a treadmill. Additionally, single recurrent neurons are used as low-pass filters to ensure smoothness. This approach is verified on a real exoskeleton in both static and dynamic situations. The experiment results show successful assistance with frequency adaptation to deal with different movement speeds.
Paper:
Akkawutvanich, C., Sricom, N., Manoonpong, P. (2024). Neural Multimodal Control for Versatile Motion Generation and Continuous Transitions of a Lower-Limb Exoskeleton. In: Youssef, E.S.E., Tokhi, M.O., Silva, M.F., Rincon, L.M. (eds) Synergetic Cooperation between Robots and Humans. CLAWAR 2023. Lecture Notes in Networks and Systems, vol 811. Springer, Cham. https://doi.org/10.1007/978-3-031-47272-5_26.
https://link.springer.com/chapter/10.1007/978-3-031-47272-5_26
Personalized Symmetrical and Asymmetrical Gait Generation of a Lower-limb Exoskeleton:

Abstract:
Personal assistive devices for rehabilitation will be in increasing demand during the coming decades due to demographic change, i.e., an aging society. Among the elderly population, difficulty in walking is the most common problem. Even though there are commercially available lower-limb exoskeleton systems, the coordination between user and device still needs to be improved to achieve versatile personalized gaits. To tackle this issue, an advanced EXOskeleton framework for Versatile personalized gaIt generation with a Seamless user-exo interface (called “EXOVIS”) is proposed in this study. The main control of the framework uses adaptive bio-inspired modular neural mechanisms. These mechanisms include decoupled central pattern generators (CPGs) with Hebbian-based synaptic plasticity and adaptive CPG post-processing networks with error-based learning. The control method facilitates the rapid online learning of personalized walking gaits described by the walking frequency as well as hip, knee, and ankle joint patterns. The method is verified on a real lower-limb exoskeleton system with six degrees of freedom (DOFs) on different subjects under static and dynamic conditions such as flat terrain and a split-belt treadmill. The results show that the proposed method can not only automatically learn to generate personalized symmetrical gaits, but also asymmetrical gaits, which have not been explicitly shown by other approaches so far.
Paper:
Akkawutvanich C and Manoonpong P. Personalized Symmetrical and Asymmetrical Gait Generation of a Lower Limb Exoskeleton. IEEE Transactions on Industrial Informatics. 2023; 19:9798-808
https://ieeexplore.ieee.org/document/10008050
Supplementary:
VDO summary:
Acknowledgement:
We would like to thank Technaid S.L. for technical support. This work was supported by the VISTEC research grant under the EXOVIS project (Grant No. I20POM-INT010 [PM]) and PTT-RAII under the VIS-RA project (Grant No. 18POM-PTT010 [PM].
2022
EXOBIC – Intelligent EXOskeleton with BIofeedbaCk for Advanced Rehabilitation:

Motivation:
An exoskeleton is one of the medical wearable robotic devices for humans. Our type is a lower-limb exoskeleton type controlling the movement of all legs’ joints. It usually uses in rehabilitation for subjects with conditions ranging from muscle weakness to movement disability. Many studies have shown that brain-computer interface (BCI) can assist to improve the damaged nervous system by reshaping the neuron connectivity (brain plasticity) which is beneficial in rehabilitation. Due to this fact, the purpose of our project is to create an intelligent exoskeleton based on those two technologies. We will enable the exoskeleton to exploit biofeedback signals i.e., Electroencephalogram (EEG), Electromyography (EMG), biomechanical movement, and forces, in order to optimally control the exoskeleton for each individual person. Moreover, this enhanced exoskeleton will be more useful when working seamlessly under an automated gait lab environment resulting in an advanced rehabilitation platform.
Technology:
This project comprises three main technologies:
- one study is going to create a neural control-based personalized exoskeleton with seamless human-machine interaction (HMI),
- one study is going to create artificial neural networks that can interpret biofeedback signals and translate the information into proper control signals, and
- one study is going to create an automated gait lab where all instruments are well-integrated, better in communication, and suitable for cloud-based solutions.
Application and expected impact:
We hope that this knowledge and innovation will improve the quality of life of vulnerable groups as mentioned. Specifically, we expect the device to be a solution or an alternative choice for disabled persons with orthoses (approx. 25% of 1.5 M disabled persons in Thailand) and also for the impact of demographic change to be an aging society (more than 50 yrs. from 33.7% in 2019 to 42.5% in 2030 [1])
In terms of the economy, this study related to an orthotic device which has a proportion within around 6.6% of the exported medical devices (2020; Durable items; approximately 10.5 B THB of 159.9 B THB [2]). The payback period is estimated to be around 2-3 years when we try to model it to be deployed in a clinical rehabilitation center.
References:
[1] Udomkerdmongkol, Manop, “Thailand Economic Focus: Demographic change in Thailand: How planners can prepare for the future | United Nations in Thailand,” Oct. 19, 2020. https://thailand.un.org/en/96303-thailand-economic-focus-demographic-change-thailand-how-planners-can-prepare-future (accessed Apr. 06, 2021).
[2] http://medicaldevices.oie.go.th/ (accessed Nov. 30, 2022)
2020
From Bipedal Locomotion to Exoskeleton:
Abstract:
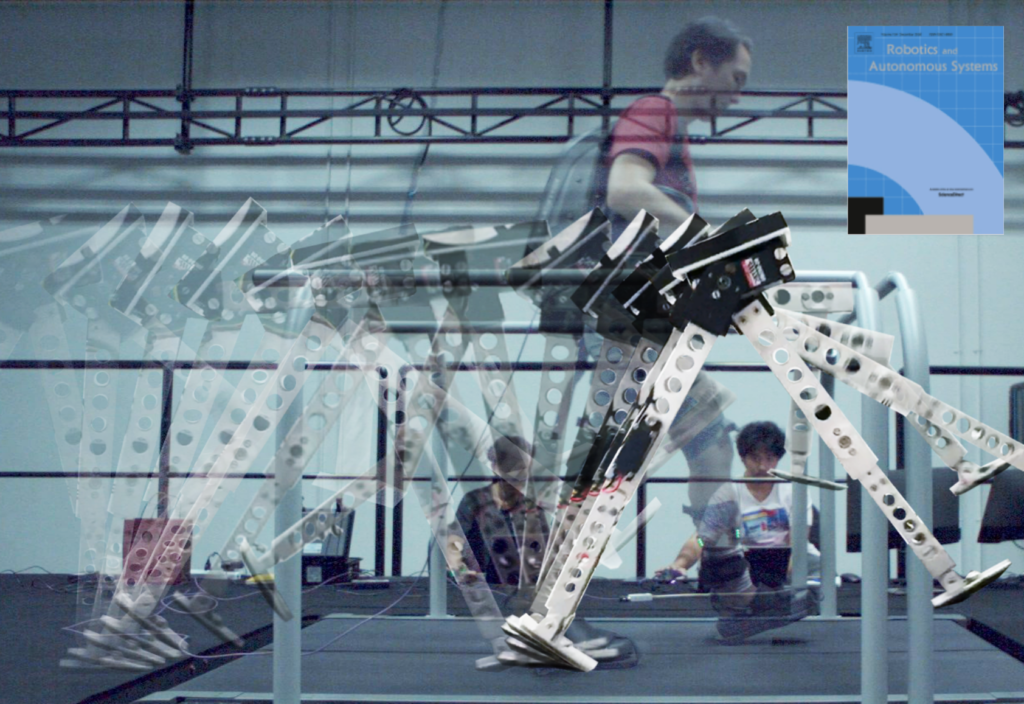
Achieving adaptive, stable, and robust bipedal locomotion and dealing with asymmetrical conditions in a robotic system remain a challenging problem. To address the problem, the research team of the BRAIN lab at IST in collaboration with the University of Southern Denmark has recently proposed novel bio-inspired adaptive motor control. We demonstrate that this real-time motor control can effectively generate adaptive and stable bipedal locomotion with robustness against sensory feedback malfunction for a biped robot. It also allows the robot to effectively walk on a treadmill at different speeds and deal with asymmetric conditions such as weight imbalance and asymmetrical elastic resistance in the legs. As an application of this control technology, we have now successfully applied it to a lower-limb exoskeleton system for gait rehabilitation. This research was supported by PTT-RAII under the VISRA project (AdVanced Human-MachIne InteractionS Technology for ImpRoving QuAlity of Life and Health).
Paper:
Akkawutvanich C, Knudsen FI, Riis AF, Larsen JC, and Manoonpong P. Adaptive parallel reflex- and decoupled CPG-based control for complex bipedal locomotion. Robotics and Autonomous Systems. 2020 Dec 1; 134:103663.
Akkawutvanich, et al., Robotics and Autonomous Systems, 2020.
Video link of the bipedal experiments:
DACBOT: Reflex-based control under normal operation and absence of sensors
DACBOT: Adaptive parallel control under normal operation and absence of sensors
DACBOT: Adaptive parallel control under different treadmill speeds
DACBOT: Adaptive parallel control with an unbalanced leg under normal and absence of sensors
DACBOT: Adaptive parallel control with asymmetrical elastic resistance