
Frontier Research Overview
How can brain-like mechanisms be developed and realized on artificial systems so they can perform multiple complex functions as biological living systems?
To address this fundamental question, we employ a bio-inspired approach to develop brain-like mechanisms for adaptive motor control and autonomous learning of embodied multi-sensorimotor robotic systems. The developed mechanisms (BRAIN technology) are adaptive and flexible, which can be transferred to application areas like human-machine interaction, brain-machine interface, and rehabilitation.
Further information: click!
Advantages of using a biologically plausible embodied kinematic model
for enhancement of speed and multifunctionality of a walking robot
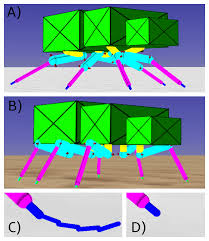
Abstract: A typical approach when designing a bio-inspired robot is to simplify an animal model and to enhance the functionality of interest. For hexapod robots, this often leads to models with an unknown performance; thereby influencing their functionality and requiring supplementary mechanics to become multifunctional. A preferable solution is to employ the embodied multifunctional capabilities of the animal as inspiration for robot design. For this reason, we present a method for translating the kinematic chain of a dung beetle, from which an accurate model and a simplified one were created and simulated. A comparison between the two modeling approaches shows a similar performance in regards to walking stability and accuracy, but differences when it comes to speed and multifunctionality. Here the accurate model outperforms the simplified model, by both walking faster and being capable of performing additional locomotory tasks. In conclusion, the accurate model of a dung beetle-inspired robot is advantageous in regards to multifunctional abilities including walking as well as standing on and rolling a ball, like a dung beetle. For more details, see Thor et al., SWARM., 2017.
Modular Neural Control for Bio-Inspired Walking and Ball Rolling of a Dung Beetle-Like Robot
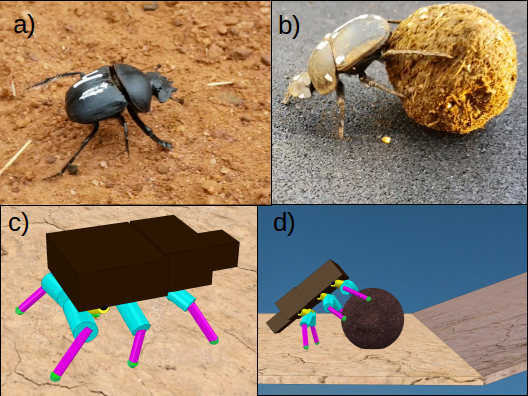
Abstract: Dung beetles can perform impressive multiple motor behaviors using their legs. The behaviors include walking and rolling a large dung ball on different terrains, e.g., level ground and different slopes. To achieve such complex behaviors for legged robots, we propose here a modular neural controller for dung beetle-like locomotion and object transportation behaviors of a dung beetle-like robot. The modular controller consists of several modules based on three generic neural modules. The main modules include 1) a neural oscillator network module (as a central pattern generator (CPG)), 2) a neural CPG postprocessing module (PCPG), 3) a velocity regulating network module (VRN). The CPG generates basic rhythmic patterns. The patterns are first shaped by the PCPG and their amplitudes as well as phases are later modified by the VRN to obtain proper motor patterns for locomotion and object transportation. Combining all these neural modules, we can achieve different motor patterns for four different actions which are forward walking, backward walking, levelground ball rolling, and sloped-ground ball rolling. All these actions can be activated by four input neurons. The experimental results show that the simulated dung beetle-like robot can robustly perform the actions. The average forward speed is 0.058 cm/s and the robot is able to roll a large ball (about 3 times of its body height and 2 times of its weight) up different slope angles up to 25 degrees. For more details, see Leung et al., ALIFE., 2018.